4
T
tải lưu lượng đầu vào TL, và y phía đầu vào chỉ thị các giá trị đầu ra được rời rạc trong khoảng tín hiệu đầu ra Y=[y1, y2,.., yN ], Các giá trị y1 đến y4 và y* được xác định như sau:
y* y1 / y2 ,
y1 yy3 ,
y
y2 y3 ,
y
y3 T *
Có thể bạn quan tâm!
-

 Mượn, Khóa Kênh Động Trên Cơ Sở Bộ Điều Khiển Logic Mờ Và Mạng Nơ Ron
Mượn, Khóa Kênh Động Trên Cơ Sở Bộ Điều Khiển Logic Mờ Và Mạng Nơ Ron -
 Pha Thỏa Thuận Với Tế Bào Liên Quan
Pha Thỏa Thuận Với Tế Bào Liên Quan -
 Sử Dụng Bộ Điều Khiển Anfis Thay Cho Bộ Điều Khiển Nfc
Sử Dụng Bộ Điều Khiển Anfis Thay Cho Bộ Điều Khiển Nfc -
 Về một phương pháp mới điều khiển mượn, khóa kênh tần số mạng di động tế bào - 11
Về một phương pháp mới điều khiển mượn, khóa kênh tần số mạng di động tế bào - 11 -
 Về một phương pháp mới điều khiển mượn, khóa kênh tần số mạng di động tế bào - 12
Về một phương pháp mới điều khiển mượn, khóa kênh tần số mạng di động tế bào - 12 -
 Khối Thực Hiện Quá Trình Mượn/cho Mượn Kênh Và Khóa Kênh.
Khối Thực Hiện Quá Trình Mượn/cho Mượn Kênh Và Khóa Kênh.
Xem toàn bộ 149 trang tài liệu này.
T*, y ,....,
y4T , y5,.....
(2.46)
T
với *
và T
là các tham số t-conorms và t-norms tương ứng. Lưu ý phương trình
y1 đến y4 và y* là khả vi, hàm mục tiêu E được định nghĩa là:
* d 2
E ky (k ) y (k) / 2
(2.47)
AC
TL
y Y
y1 , y 2 , ..., y N
y5
VC
C T
T
M
T
H
T
VH
T
LL T
LM T
LH T
T
NL
T
NM
T
NS
T
AZ
PS T
PM T
PL T
y4
Σ y2
*
T* y3 /
ΣΠ y1 y
Hình 2.8. Mạng nơ ron huấn luyện tìm hệ số của toán tử mờ
trong đó y*(k) và yd(k) là đầu ra thực sự và đầu ra mong muốn tương ứng của bộ điều
T
khiển ứng với mẫu huẫn luyện thứ k. Thực hiện lấy đạo hàm (2.47) theo *
được kết quả:
và T
thu
EdE dy* dy1 dy* dy2 dy3
(2.48)
dy* dy1 dy3 dy2 dy3 d
T * T *
E dE dy* dy1 dy* dy2 dy3 dy4
(2.49)
dy* dy1 dy3 dy2 dy3 dy4 d
T T
T
từ đó dựa vào thuật giảm gradient, luật cập nhật *
và T
có thể được viết như sau:
T
T * (k 1) *
(k) E
(2.50)
T (k 1) T
T *
(k ) E
(2.51)
T
Phương trình (2.50) tương ứng với T* và (2.51) cho T. Cuối cùng tìm được tối ưu và xác định được toán tử mờ tối ưu với η>0 là hệ số học.
Sau khi xác định được tập luật mờ tối ưu, bộ điều khiển logic mờ sẽ sử dụng tập
luật này để ánh xạ tín hiệu đầu vào tới đầu ra để xác định trạng thái tải tế bào và tính số kênh cho phép cần mượn hoặc số kênh mà tế bào có thể cho các tế bào khác mượn.
2.5. Kết luận
Trong chương này, luận án đã khảo sát các thuật toán mượn kênh và cân bằng tải động FDCBS trên cơ sở bộ điều khiển logic mờ, NFDCBS trên cơ sở mạng nơ ron mờ thích nghi. Kết quả của các thuật toán này [47][48] là đã khắc phục được hạn chế của các thuật toán truyền thống do sử dụng giá trị ngưỡng để phân tách trạng thái tải tế bào và việc tính toán xác định ngưỡng quá phức tạp. Đồng thời nó cũng chứng tỏ khả năng dự báo tải tế bào tốt hơn do sử dụng cả tín hiệu đầu vào gồm cả số kênh cho phép và tải lưu lượng của tế bào. Kết quả mô phỏng [47][48] đã cho thấy thuật toán FDCBS và NFDCBS đã cho xác suất khóa kênh, xác suất dớt cuộc gọi thấp, sự truyền thông điệp
ít hơn và thời gian trễ thu kênh ngắn hơn so với các phương pháp truyền thống [47][48]. Sau đó trong chương này luận án cũng chỉ ra những hạn chế của các thuật toán của Yao-Tien Wang và đề xuất các cải tiến khắc phục hạn chế của bộ điều khiển mượn kênh bằng cách sử dụng bộ điều khiển ANFIS, với việc tối ưu toán tử mờ bằng cách huấn luyện với tập mẫu vào/ra. Từ đó nâng cao khả năng xấp xỉ của bộ điều khiển logic mờ với dữ liệu đầu ra huấn luyện.
Tuy nhiên các bộ điều khiển mượn kênh sử dụng mạng nơ ron này vẫn còn tồn tại nhiều hạn chế mà ảnh hưởng đến dung lượng kênh và chất lượng của mạng di động tế bào:
Không chỉ ra cách mượn kênh như thế nào: Khóa kênh hay chọn kênh trên cơ sở nhiễu.
Thuật toán không chỉ ra mức độ ưu tiên trong xử lý cuộc gọi chuyển tiếp với cuộc gọi mới.
Thời gian tính toán lớn, tối ưu số luật mờ còn hạn chế.
Không đánh giá được tác động của phần điều kiện lên từng phần kết luận tập luật từ đó hạn chế về mức độ chính xác.
Các thuật toán FDCBS và NFDCBS sử dụng DCA tập trung nên việc cập nhật cân bằng tải xẩy ra theo chu kỳ bởi MSC nên chưa đáp ứng được mức độ cân bằng tải phù hợp, nhất là khi tải lưu lượng thay đổi nhanh.
Trong NFDCBS sử dụng toán tử t-norm, t-cornorm. Việc chọn dạng toán tử là tùy vào người sử dụng và bỏ qua thông tin kích cỡ mẫu đầu vào.
Việc sử dụng DCA tập trung gây cho MSC dễ bị quá tải.
Từ các hạn chế này, trong chương tiếp theo, luận án sẽ đề xuất bộ điều khiển mượn, khóa kênh phân tán trên cơ sở sử dụng mạng nơ ron mờ tích hợp phép đo subsethood để khắc phục các hạn chế của các thuật toán trên cơ sở bộ điều khiển logic mờ hoặc bộ điều khiển mạng nơ ron –mờ truyền thống.
Chương 3. ĐIỀU KHIỂN MƯỢN KÊNH ĐỘNG PHÂN TÁN TRÊN CƠ SỞ MẠNG NƠ RON–MỜ-SUBSETHOOD
Trong chương 3 luận án sẽ đề xuất bộ điều khiển mượn kênh động phân tán trên cơ sở mạng nơ ron –mờ sử dụng phép đó subsethood (DBNFS). Đồng thời cũng xét quá trình thu kênh và khóa kênh trong tế bào đồng kênh. Bộ điều khiển này cho phép khắc phục những hạn chế của các bộ điều khiển đã xét trong chương 2. Đồng thời tăng dung lượng kênh và nâng cao chất lượng dịch vụ (QoS) cho hệ thống di động tế bào.
3. 1. Mở đầu
Các phương pháp điều khiển mượn kênh mạng di động tế bào trình bày trong chương 2 dựa trên bộ điều khiển logic mờ và các bộ điều khiển nơ ron-mờ đã cho phép khắc phục được nhược điểm của các phương pháp mượn, khóa kênh truyền thống. Nhưng các phương pháp này vấn còn nhiều hạn chế: thứ nhất là trong các phương pháp này việc thiết kế tập luật điều khiển là vấn đề cực kỳ quan trọng, tập luật mờ có vai trò quyết định chất lượng của các bộ điều khiển này. Trong thuật toán mượn kênh FDCBS, tập mờ thu được hoàn toàn phụ thuộc vào tri thức chuyên gia, còn trong thuật NFDCBS khắc phục được hạn chế này bằng cách sử dụng mạng nơ ron mờ phát sinh tập luật trên cơ sở tập dữ liệu huấn luyện. Nhưng do bản chất của bộ điều khiển mạng nơ ron mờ sử dụng nên kết quả cho tập luật mờ thu được còn hạn chế về khả năng xấp xỉ tín hiệu đầu ra, dẫn đến tín hiệu giải mờ kém chính xác. Thứ hai là bộ điều khiển mạng nơ ron mờ sử dụng các phép toán mờ t-norms hoặc t-conorm, việc tối ưu cũng như tính toán quá phức tạp, tốn thời gian. Chính vì vậy trong chương này, luận án sẽ đề xuất thuật toán mượn kênh động DBNFS sử dụng bộ điều khiển logic mờ, với tập mờ được tối ưu và phát sinh dựa trên tập dữ liệu huấn luyện trên cơ sở mạng nơ ron mờ sử dụng phép đo subsethood (NFS). Việc sử dụng phép đo subsethood mờ cho phép đánh giá sự đóng góp của phần điều kiện tới mỗi phần kết luận của tập luật mờ nhờ trong mạng nơ ron –mờ sử dụng các liên kết mờ. Bộ điều khiển mới cho phép tăng độ chính
xác, khả năng mềm dẻo, giảm khối lượng tính toán, giảm số luật và sự phụ thuộc vào tri thức chuyên gia. Đồng thời nó cũng cho phép nâng cao khả năng mượn kênh, giảm xác xuất khoá cuộc gọi, xác suất rớt cuộc gọi, giảm thời gian trễ thu kênh trong quá trình mượn kênh khi một cuộc gọi mới yêu cầu hoặc chuyển giao (handoff), từ đó nâng cao chất lượng và sự ổn định của mạng di động tế bào.
Sau đây luận án sẽ thực hiện thiết kế bộ điều khiển mượn kênh DBNFS. Đồng thời luận án cũng chỉ ra các thuật học online, học batch cho NFS, thuật toán mượn, khóa kênh của DBNFS.
3.2. Xây dựng bộ điều khiển mượn kênh DBNFS
3.2.1. Mô hình mạng di động tế bào
Mạng gồm một tập các tế bào hình lục giác [3][5]. Mỗi tế bào được cung cấp một trạm cơ sở BS đặt ở trung tâm. Các BS được kết nối với nhau bởi mạng hữu tuyến cố định mà ở đó cung cấp một truyền thông FIFO tin cậy. Để thiết lập một phiên truyền thông (hoặc cuộc gọi), một trạm di động MS gửi yêu cầu tới BS trong tế bào của nó. Phiên truyền thông sẽ được thực hiện nếu có một kênh vô tuyến được cấp phát cho truyền thông giữa MS và BS. Hai tế bào có thể sử dụng cùng kênh nếu khoảng cách địa lý giữa chúng tối thiểu và lớn hơn ngưỡng Dmin. Ngược lại phiên truyền thông sẽ gây nhiễu cho các kênh khác và được gọi là hiện tượng nhiễu kênh. Cho một tế bào Ci, một tập tế bào lân cận gây nhiễu cho Ci được định nghĩa bởi INi thì:
INi={Cj |dist(Ci,Cj)<Dmin } (3.1)
Như thể hiện trên hình 3.1, với R là bán kính tế bào, Dmin là khoảng cách sử dụng lại kênh cực tiểu. Nếu giả sử luật suy giảm là luật fourth-power [2][11], thì tỉ số tín hiệu trên nhiễu được cho bởi:
[S/I]min=[(Dmin/R)-1]4 /6 (3.2)
Với Dmin=3√3 R, [S/I]min≈17dB, đây là giá trị phù hợp được sử dụng trong thực tế. Sự phân hoạch mạng di động tế bào được thực hiện thỏa mãn 3 luật sau:
Phân vùng tập tất cả các tế bào thành một số tập con phân biệt, G0, G1, ..., Gk-1 , sao cho bất cứ 2 tế bào nào trong cùng tập con cũng cách nhau bởi khoảng cách tối thiểu Dmin. Tương tự, tập tất cả các kênh cũng được phân hoạch thành K tập con phân biệt: P0, P1, ..., Pk-1.
Các kênh trong Pi (i=0,1, ...,k-1) là các kênh cơ bản của các tế bào trong Gi và là kênh thứ cấp của các tế bào trong Gj (j≠i).
Một tế bào yêu cầu một kênh thứ cấp chỉ khi không còn các kênh cơ bản được phép nữa.
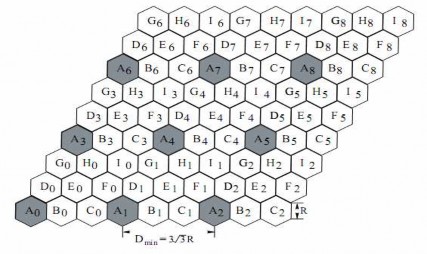
Hình 3.1: Phân vùng mạng di động tối ưu
Để thuận tiện, một tế bào Ci sẽ là một tế bào cơ sở (hoặc thứ cấp) của một kênh r khi và chỉ khi r là một kênh cơ bản (hoặc thứ cấp) của Ci .Như vậy tế bào trong Gi là các tế bào sơ cấp của các kênh trong Pi và là tế bào thứ cấp của các kênh trong Pj(j≠i). Đối với một tế bào Ci không thuộc Gp và một kênh r thuộc Pp, các tế bào sơ cấp gây nhiễu của r đối với Ci được định nghĩa là IPi(r), là tế bào sơ cấp của r và là tế bào lân cận nhiễu của Ci, nghĩa là IPi(r)=Gp thì INi∩ IPi(r) được gọi là tập con phân vùng nhiễu của Ci.
Để đạt được mục đích tái sử dụng kênh tốt hơn, mỗi tập con Gi nên chứa nhiều tế bào mà có thể và K nên nhỏ đến mức có thể. Và sự phân vùng phải thoả mãn thuộc tính với dist(Ci,Cj)>=Dmin. với mọi Ci, Cj thuộc Gp.
Hình 3.1 thể hiện một cách phân vùng, ở đó chia các tế bào vào 9 tập con: GA, GB, Gc,...,GI. Các tế bào trong GA={CAi |0<=i<=8} có thể sử dụng cùng kênh mà không bị nhiễu. Từ đó khoảng cách giữa bất kỳ 2 tế bào gần nhau nhất trong một tập con phải chính xác là Dmin, nó là một sự phân vùng tối ưu trong quang cảnh mà mỗi kênh sẽ được sử dụng lại cực đại bởi các lân cận của nó [18].
3.2.2. Xây dựng bộ điều khiển mượn kênh DBNFS
Bộ điều khiển mượn kênh DBNFS có các thành phần như hình 3.2. Để ước lượng trạng thái tải tế bào DBNFS cũng sử dụng số kênh cho phép (AC) và thông số tải lưu lượng (TL) làm các biến đầu vào của bộ điều khiển logic mờ với tập luật được phát sinh sử dụng khối điều khiển NFS.
Khối điều khiển thông minh
Khối xác lập chỉ thị trạng thái tải tế bào
Cơ sở luật mờ
Khối mờ hoá
Khối giải mờ
TL
Khối suy diễn mờ
Khối thực hiện quá trình mượn/cho mượn kênh
3
AC
4
Khối phát sinh tập luật NFS (Mạng nơ ron mờ- subsethood)
TL: Tải lưu lượng AC: Số kênh cho phép
1: Cho mượn kênh 2: Thực hiện mượn kênh 1 2
3, 4. Cập nhật thông tin trạng thái tải tế bào
Hình 3.2: Bộ điều khiển mượn kênh DDBNFS
DBNFS gồm 3 khối thành phần: Bộ điều khiển thông minh, bộ xác lập chỉ thị trạng thái tải tế bào, khối thực hiện quá trình mượn/cho mượn kênh. Trong đó khối điều khiển thông minh gồm bộ điều khiển logic mờ và khối phát sinh tập luật mờ trên cơ sở mạng nơ ron mờ với liên kết mờ được định lượng bằng phép đo subsethood (NFS).
3.2.2.1. Thiết kế khối điều khiển thông minh
Hạt nhân của bộ điều khiển thông minh là bộ điều khiển logic mờ (FLC). Bộ điều khiển này thực hiện lập luận xấp xỉ để đưa ra quyết định trạng thái tải tế bào và số kênh mượn/cho mượn sau khi giải mờ trên cơ sở tín hiệu đầu vào là số kênh cho phép và thông tin tải lưu lượng của tế bào. Bộ điều khiển logic mờ gồm 4 khối cơ bản: Khối mờ hoá, khối cơ sở luật mờ, khối suy diễn mờ và khối giải mờ.
Khối mờ hoá
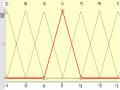
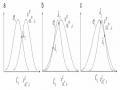
Khối mờ hoá thực hiện chức năng mờ hoá để chuyển giá trị đo rõ thành giá trị ngôn ngữ. Mức độ liên thuộc được biểu diễn bởi giá trị trong khoảng 0 và 1. Các phép bù, giao và hợp mờ cũng được định nghĩa theo định nghĩa mờ của Zadeh [56]. Khối mờ hóa thực hiện ánh xạ các tín hiệu rõ AC, TL thành các tập mờ như sau: Giả sử tín hiệu đầu vào là số kênh cho phép (AC) và tải lưu lượng (TL). Tín hiệu kênh cho phép AC giả sử thuộc khoảng [cmin, cmax ] và được mờ hoá thành các tập mờ thành phần được định nghĩa như VeryCol (VC), Col (C), Moderate (M), Hot (H), VeryHot (VH) (hình
3.3). Với
x [co , c4 ], hàm liên thuộc của các tập mờ dạng Gauss được xác định như sau:
i
( A j ) e(xaj ci ) / 2ai
(3.2)
Với ci là tâm của hàm liên thuộc,
cic0,c1,c2,c3,c4, σai là hệ số trải của hàm Gauss,
A
i
j là giá trị hàm liên thuộc tập mờ i tương ứng giá trị đầu vào xaj,
Ai VC, C, M , H ,VH(sử dụng hàm liên thuộc dạng Gauss để đảm bảo tính khả vi khi thực hiện truyền ngược.)