| Xuất tín hiệu PWM ra chân cắm Arduino. Có 2 ô giá trị: + Ô thứ nhất là số chân cắm PWM trên Arduino cần xuất ra. + Ô thứ hai là giá trị cần xuất. Tín hiệu PWM có giá trị 0 – 255. Có thể chèn khối lệnh báo cáo ở ô trống. | |
|
| Xuất tín hiệu âm thanh ra một chân digital trong một khoảng thời gian. Gồm 3 ô: +Ô thứ nhất là số chân cắm digital trên Arduino cần xuất ra. + Ô thứ 2 là một bảng chọn nốt trong âm nhạc. Kí tự C, D, E, F, G, A, B đại diện cho nốt đô, rê, mi, pha, son, la, si, đo; con số bên cạnh là thứ tự quãng tám. + Ô thứ 3 là thời gian phát âm thanh. Có thể chèn khối lệnh báo cáo ở ô trống. |
|
| Điểu khiển động cơ servo tại một chân cắm quay theo một góc yêu cầu. Gồm 2 ô: + Ô thứ 1 là số chân cắm digital trên Arduino cắm vào động cơ servo. + Ô thứ 2 là góc xoay động cơ (độ). Có thể chèn khối lệnh báo cáo ở ô trống. |
|
| In ra màn hình Serial chuỗi kí tự hoặc một giá trị nào đó. Ô trống này có thể chèn khối lệnh báo cáo để in ra giá trị tương ứng. |
|
| Khởi động lại đồng hồ đếm thời gian của chương trình Arduino. |








Có thể bạn quan tâm!
-
 Dựa Vào Hình Của Cảm Biến Hồng Ngoại Sau, Kể Tên Các Chân Nối Và Chức Năng Của Chúng
Dựa Vào Hình Của Cảm Biến Hồng Ngoại Sau, Kể Tên Các Chân Nối Và Chức Năng Của Chúng -
 Thiết kế chủ đề STEM xe robot tự dò đường nhằm bồi dưỡng năng lực giải quyết vấn đề cho học sinh Trung học cơ sở - 23
Thiết kế chủ đề STEM xe robot tự dò đường nhằm bồi dưỡng năng lực giải quyết vấn đề cho học sinh Trung học cơ sở - 23 -
 Tải Thêm Extension Để Điều Khiển Motor Bằng Mạch Điều Khiển L293D
Tải Thêm Extension Để Điều Khiển Motor Bằng Mạch Điều Khiển L293D -
 Thiết kế chủ đề STEM xe robot tự dò đường nhằm bồi dưỡng năng lực giải quyết vấn đề cho học sinh Trung học cơ sở - 26
Thiết kế chủ đề STEM xe robot tự dò đường nhằm bồi dưỡng năng lực giải quyết vấn đề cho học sinh Trung học cơ sở - 26
Xem toàn bộ 216 trang tài liệu này.
Trong Arduino, đồng hồ thường bắt đầu đếm khi mới khởi động. | ||
|
| Tạm dừng chương trình trong một khoảng thời gian. Ô trống để điền giá trị hoặc chèn khối lệnh báo cáo. |
|
| Tạm dừng chương trình đến khi một điều kiện nào đó là ĐÚNG. Cần phải ghép thêm khối lệnh logic vào khối này để sử dụng đượ. |
|
| Gán một giá trị cho biến số. Có thể chọn biến số cần gán, điền giá trị cần gán vào ô giá trị hoặc chèn khối lệnh báo cáo. |
|
| Cộng thêm 1 giá trị cho biến số bất kì. Có thể chọn biến số cần thêm, điền giá trị công thêm vào ô giá trị hoặc chèn khối lệnh báo cáo. |


c) Khối lệnh báo cáo (Reporter blocks)
+ Chức năng: Khối lệnh báo cáo hay khối lệnh giá trị được sử dụng để hiển thị hoặc trả lại một giá trị nào đó trong chương trình. Khối lệnh báo cáo có thể chứa bất kỳ giá trị nào từ dữ liệu kiểu số đến kiểu chuỗi hoặc là một phép toán (+, -, *, /).
![]()
+ Đặc điểm:
Với hình dạng cạnh trơn, không có khớp nối. Chúng thường là tham số cho các khối lệnh khác hoặc đường lồng vào chính nó.
Các khối lệnh này được phân bố chủ yếu trong các nhóm lệnh Pin, Data, Sensors và Operators.
Khối lệnh Logic ở trên là một trường hợp đặc biệt của khối lệnh báo cáo vì giá trị trả lại của nó là ĐÚNG hoặc SAI.
+ Các khối lệnh báo cáo trong lập trình Arduino:
Nhóm | Chức năng | |
|
| Đọc tín hiệu Analog từ một chân Analog trên Arduino. Kết quả trả về là một số 0 – 1023. |
|
| Đọc dữ liệu từ cảm biến siêu âm được cắm từ 2 chân Trig, Echo trên cảm biến vào 2 chân digital tương ứng trên Arduino. Kết quả trả về là khoảng cách từ cảm biến đến vật cản, đơn vị cm. |
|
| Trả về một số là thời gian kế từ lúc Arduino bắt đầu hoạt động đến khi gọi khối lệnh này. Kết quả là thời gian, đơn vị giây (s). |
| Thực thi và trả về kết quả của các phép tính cộng, trừ, nhân, chia. Có thể chèn giá trị hoặc khối lệnh báo cáo. | |
|
| Thực thi và trả về kết quả của các phép tính chia lấy dư một số với một số. Có thể chèn giá trị hoặc khối lệnh báo cáo. |
|
| Trả về kết quả là phép làm tròn về số nguyên của một số. Ví dụ làm tròn 2.5 thành 3. Có thể chèn giá trị hoặc khối lệnh báo cáo. |
| Trả về kết quả là phép lấy giá trị tuyệt đối của một số. Có thể chèn giá trị hoặc khối lệnh báo cáo. Ngoài ra trong bảng chọn có rất nhiều phép toán toán học như: tan, cosin, sin, ln, e^x, log, 10^x, atan, acos, asin, sqrt (căn bậc 2), floor (làm tròn lên), ceiling (làm tròn xuống). |



| Trả về kết quả là giá trị của biến số đó đang lưu. |
d) Khối lệnh logic (Boolean blocks)
+ Chức năng: Khối lệnh Logic hay khối lệnh điều kiện được sử dụng trong các tình huống để kiểm tra điều kiện ĐÚNG/SAI. Kết quả trả lại là một giá trị hoặc ĐÚNG hoặc SAI.
![]()
+ Đặc điểm:
Với hình dạng 6 cạnh, các khối lệnh này không có khớp nối, vì vậy chúng không được sử dụng độc lập, mà thường là tham số cho các khối lệnh khác hoặc được lồng vào chính khối lệnh Logic.
Các khối lệnh này được phân bố chủ yếu trong các nhóm lệnh Operators.
Trong một chương trình, khi khối lệnh này được gọi đến, nó sẽ đưa ra một kết quả hoặc ĐÚNG hoặc SAI với những điều kiện logic.
Chúng ta thường sử dụng khối lệnh này để kiểm tra các điều kiện so sánh (>, <,
=), điều kiện logic (and, or, not), điều kiện chứa (contains?).
+ Các khối lệnh logic trong lập trình Arduino:
Nhóm | Chức năng | |
|
| Đọc tín hiệu digital tại một chân digital. Gồm một ô giá trị là số thự tự chân digital trên Arduino, hoặc có thể chèn khối lệnh báo cáo. Kết quả trả về là ĐÚNG nếu tín hiệu là HIGH; SAI nếu tín hiệu là LOW. |
| Trả về kết quả ĐÚNG/SAI của phép so sánh lớn hơn, bé hơn, hay so sánh bằng. Có thể chèn giá trị hoặc khối lệnh báo cáo. | |
|
| Trả về kết quả ĐÚNG/SAI của phép logic “và” của 2 mệnh đề logic. Có 2 ô bên trong |

có thể chèn 2 khối lệnh logic tương ứng với 2 mệnh đề. Kết quả là ĐÚNG nếu cả 2 mệnh đề đều ĐÚNG. Là SAI nếu 1 trong 2 mệnh là SAI. | ||
|
| Trả về kết quả ĐÚNG/SAI của phép logic “hay” của 2 mệnh đề logic. Có 2 ô bên trong có thể chèn 2 khối lệnh logic tương ứng với 2 mệnh đề. Kết quả là ĐÚNG nếu 1 trong 2 mệnh đề ĐÚNG. Là SAI nếu cả 2 mệnh đều đề là SAI. |
|
| Trả về kết quả ĐÚNG/SAI của phép logic “phủ định” một mệnh đề logic. Có 1 ô bên trong để chèn 1 khối lệnh logic tương ứng với mệnh đề. Kết quả là ĐÚNG nếu mệnh đề là SAI, ngược lại, là SAI nếu mệnh đề là ĐÚNG. |
e) Khối lệnh điều khiển (Control blocks)
+ Chức năng: Khối lệnh điều khiển được sử dụng để xử lý các tình huống điều kiện nếu
-thì và thực hiện điều khiển các vòng lặp.

+ Đặc điểm:
Với hình dạng giống chữ C (C blocks), khối lệnh này có các khớp nối bên trong và bên ngoài để liên kết, lắp ghép với các khối lệnh khác.
Có tất cả 5 khối lệnh điều khiển. Các khối lệnh này được phân bố chủ yếu trong nhóm lệnh Control.
Khối lệnh điều khiển có rất nhiều tác dụng. Biết sử dụng thành thạo các khối lệnh này sẽ có thể tạo thành một thuật toán giải quyết được rất nhiều bài toán thực tế.
+ Các khối lệnh điều khển trong lập trình Arduino:
Nhóm | Chức năng |
| Khối lệnh vòng lặp với số lần lặp biết trước. Gồm một ô để ghi giá trị số lần lặp, bên trong là chứa các khối lệnh hành động để lặp lại. Ví dụ: chơi nốt C7 10 lần, mỗi lần 0.25s ở chân cắm số 1. | |
|
| Khối lệnh vòng lặp vô hạn: các khối lệnh hành động bên trong khối lệnh này sẽ lặp lại vô hạn lần cho tới khi Arduino ngưng hoạt động. Cạnh dưới khối lệnh này không có khớp nối với khối lệnh khác. |
|
| Khối lệnh điều kiện nếu-thì, gồm một ô chứa khối lệnh logic, bên trong để chứa các khối lệnh hành động. Nếu khối logic có giá trị ĐÚNG thì thực hiện hành động bên trong, nếu SAI thì không thực hiện. Ví dụ: Nếu a > 50, gán giá trị mới cho a là a nhân với 100. |
|
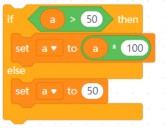
| Khối lệnh điều kiện nếu-thì-nếu không: gồm một ô chứa khối lệnh logic, bên trong có chứa 1 khoảng trống sau ‘then’ và 1 khoảng trống sau ‘else’ để chứa các khối lệnh hành động. Nếu khối lệnh logic có giá trị ĐÚNG thì thực hiện khối hành động sau ‘then’, ngược lại, nếu SAI thì thực hiện hành động sau ‘else’. |








Ví dụ: Nếu a > 50, gán giá trị mới cho a là a nhân với 100, nếu không, gán giá trị mới cho a là 50.
| ||
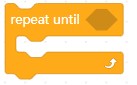
|
| Khối lệnh lặp có điều kiện: gồm một ô chứa khối lệnh điều kiện, bên trong chứa khối lệnh hành động. Khối lệnh lặp này sẽ lặp lại các hành động cho đến khi khối điều kiện có giá trị ĐÚNG. Ví dụ: Mỗi lần lặp cộng thêm cho a 1 đơn vị, cho đến khi a = 50. |

f) Khối lệnh điều khiển motor (Robot)
Tất cả các khối lệnh điều khiển motor đều thuộc nhóm khối lệnh xếp chồng
Nhóm | Chức năng | |
|
| Dùng để ra lệnh thực thi cho motor ở nối vào chân cắm “M1” quay theo chiều tiến với mức công suất 100%. Khối lệnh này có 2 ô chọn: + 1 ô để chọn vị trí chân nối motor với vi mạch, gồm 4 chân M1, M2, M3, M4 + 1 ô để điền giá trị công suất từ 0% đến 100% (0% là yếu nhất, 100% là mạnh nhất). |

| Dùng để ra lệnh thực thi cho motor ở nối vào chân cắm “M1” quay theo chiều tiến với mức công suất 100% trong thời gian 1 giây. Khối lệnh này có 3 ô chọn: + 1 ô để chọn vị trí chân nối motor với vi mạch, gồm 4 chân M1, M2, M3, M4. + 1 ô để điền giá trị công suất từ 0% đến 100% + 1 ô để điền thời gian quay, tính theo giây. | |
|
| Khối lệnh để ra lệnh thực thi dừng quay motor. Khối lệnh này có 1 ô chọn: vị trí chân nối motor với vi mạch, gồm 4 chân M1, M2, M3, M4. |
|
| Dùng để ra lệnh thực thi cho motor ở nối vào chân cắm “M1” quay theo chiều lùi với mức công suất 100%. Khối lệnh này có 2 ô chọn: + 1 ô để chọn vị trí chân nối motor với vi mạch, gồm 4 chân M1, M2, M3, M4. + 1 ô để điền giá trị công suất từ 0% đến 100% |
|
| Dùng để ra lệnh thực thi cho motor ở nối chân “M1” quay theo chiều lùi với mức công suất 100% trong thời gian 1 giây. Khối lệnh này có 3 ô chọn: + 1 ô để chọn vị trí chân nối motor với vi mạch, gồm 4 chân M1, M2, M3, M4. + 1 ô để điền giá trị công suất từ 0% đến 100% |



