Hình 3.12 Đèn báo EPS 49
3.3. CÁCH ĐỌC VÀ XÓA MÃ LỖI. 50
3.3.1 Cách đọc mã lỗi. 50
Hình 3.13 Vị trí giắc kết nối máy chẩn đoán. 50
Hình 3.14 Giắc chẩn đoán mã lỗi và đèn báo bằng tay 51
Hình 3.15 Dạng mã lỗi bình thường 51
Bảng 3.1 Bảng mã lỗi 52
3.3.2 Xóa mã lỗi. 53
Hình 3.16 Mã lỗi sau khi xóa bằng tay xong. 53
3.4. CHẾ ĐỘ DỰ PHÒNG CỦA HỆ THỐNG. 53
Có thể bạn quan tâm!
-

 Thiết kế chế tạo mô hình hệ thống lái trợ lực điện - 1
Thiết kế chế tạo mô hình hệ thống lái trợ lực điện - 1 -
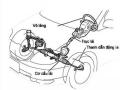 Nguyên Lý Hoạt Động,các Bộ Phận Hệ Thống Lái.
Nguyên Lý Hoạt Động,các Bộ Phận Hệ Thống Lái. -
 Tỷ Số Truyền Và Hiệu Suất Của Thống Lái.
Tỷ Số Truyền Và Hiệu Suất Của Thống Lái. -
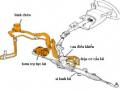 Vị Trí Lắp Đặt Và Chức Năng Của Các Bộ Phận.
Vị Trí Lắp Đặt Và Chức Năng Của Các Bộ Phận.
Xem toàn bộ 92 trang tài liệu này.
Bảng 3.2 Chế độ dự phòng 54
3.5. CÁC HƯ HỎNG THƯỜNG GẶP VÀ CÁCH KHẮC PHỤC. 54
Bảng 3.3 Các hư hỏng và cách khắc phục. 55
Hình 3.17 Hiển thị các chân hệ thống 55
Bảng 3.4 Điện áp bình thường của các bộ phận trong hệ thống 57
Chương IV:THIẾT KẾ, CHẾ TẠO MÔ HÌNH HT LÁI TRỢ LỰC ĐIỆN 58
4.1 MÔ TẢ MÔ HÌNH 58
4.2 PHẦN THIẾT KẾ 58
Hình 4.1 Hình chiếu bằng của khung 58
Hình 4.2 Hình chiếu cạnh của khung 59
Hình 4.3 Hình chiếu 3D 59
4.3 CHẾ TẠO CƠ CẤU HÃM 59
Hình 4.4 Cơ cấu trên hệ thống 60
4.4 PHẦN THIẾT KẾ SA BÀN: 60
Hình 4.5 Cơ cấu sa bàn 60
Hình 4.6 Sa bàn thực tế 61
4.5 PHẦN MẠCH ĐIỀU KHIỂN 61
4.5.1 Quá Trình Thiết kế mạch 61
Hình 4.7 Pic 18F4431 62
Hình 4.8 Mạch tạo tín hiệu tốc độ xe 64
Hình 4.9 Mạch lặp điện áp tín hiệu 65
Hình 4.10 Mạch hiển thị tín hiệu 66
Hình 4.11 Mạch in hiển thị tín hiệu 66
Hình 4.12 Mạch hiển thị thực tế 67
Hình 4.13 Mạch reset 67
Hình 4.14 Mạch công suất 68
Hình 4.1 Mạch công suất thực tế 69
Hình 4.16 Mạch nguồn 5V 69
Hình 4.17 Cổng nối 70
Hình 4.18 Mạch điều khiển 71
Hình 4.19 Mạch điều khiển thực tế 72
Lưu đồ quay 72
Chương V: HỆ THỐNG LÁI TRỢ LỰC ĐIỆN 74
5.1.MÔ HÌNH HOÀN CHỈNH: 74
Hình 5.1. Mô hình hoàn chỉnh 74
5.1.1 Các chân trên mô hình: 75
Hình 5.2 Các chân trên xa bàn 75
Hình 5.3 .Điều chỉnh tốc độ xe 76
5.2 QUI TRÌNH VẬN HÀNH 76
Hình 5.4 Xe đang ở vị trí đứng yên 76
Hình 5.5 Vô lăng ở trung gian 77
Hình 5.6 Vô lăng quay phải 77
Hình 5.7 Vô lăng quay trái 77
5.3 NHẬN XÉT MÔ HÌNH: 78
5.4 CÁC BÀI THỰC HÀNH: 79
Phần C:KẾT LUẬN VÀ KIẾN NGHỊ
I KẾT LUẬN: 85
II KIẾN NGHỊ 85
III TÀI LIỆU THAN KHẢO 87
![]()
Phần A: TỔNG QUAN
1. Đại vấn đề:
Với sự phát triển không ngừng của lĩnh vực cơ–điện tử trên thế giới nên nhiều năm vừa qua nhiều quốc gia đã ứng dụng thành công cơ–điện tử trong nhiều ngành. Trong đó, việc các nhà sản xuất ô tô đã ứng dụng điện trên hệ thống lái giúp quá trình điều khiển chính xác, giảm bớt sự mệt nhọc của tài xế khi điều khiển xe, giảm xuất tiêu hao nhiên liệu, giảm ô nhiễm môi trường, mà các hệ thống trợ lực lái khác không làm được. Ở nước ta do còn nhiều hạn chế như đường xá, khoa học kỹ thuật, chính sách của nhà nước…Nên ngành ô tô vẫn chưa được phát triển nhiều. Do đó, ô tô sử dụng hệ thống lái trợ lực điên vẫn là một vấn đề mới ở nước ta mặc dù hệ thống này được hãng
Suzuki ứng dụng năm 1988.
Đồng thời, với tình hình hiện tại và tương lai, Trường ĐH Sư Phạm Kỹ Thuật Tp.HCM là trường tiên phong trong việc đào tạo nguồn nhân lực cho đất nước trên lĩnh vực ôtô. Với nhiệm vụ cao cả ấy trường luôn định hướng và cải thiện chương trình đào tạo, cụ thể như trường luôn áp dụng các mô hình hiện đại vào chương trình học, để sinh viên luôn tiếp cận và trực tiếp tiếp xúc với công nghệ mới.
Cũng chính vì vậy nhóm chúng em được sự hướng dẫn của thầy Vò Xuân Thành đã chọn nghiên cứu đề tài.Thiết Kế, Chế Tạo Mô Hình Lái Trợ Lực Điện Trên xe Suzuki-WagonR+
2. Giới hạn đề tài:
Một hệ thống hoạt động ngoài thực tế thì đòi hỏi sự tổng hợp của rất nhiều tín hiệu đầu vào và sự kết hợp tín hiệu từ các hệ thống khác để đảm bảo độ chính xác và tính an toàn cao nhất. Hệ thống EPS cũng vậy, nó muốn hoạt một cách chính xác và an toàn thì đòi hỏi phải có sự tổng hợp của nhiều thông tin đầu vào từ các cảm biến như: Cảm biến
tốc độ xe, cảm biến mô men xoắn,.. Để bộ điều khiển của hệ thống có sự tính toán, so sánh và đưa ra thông tin điều khiển một cách chính xác.
Một mô hình mô phỏng hệ thống EPS muốn làm đầy đủ các điều đó thì đòi hỏi rất nhiều điều kiện như: Có thời gian, có hiểu biết sâu về lập trình, có kinh nghiệm thực tế, có kinh phí… Do trình độ và thời gian có hạn nhóm chúng em tập trung vào nghiên cứu, phân tích và chế tạo mạch điện điều khiển, thiết lập mô hình hoạt động Suzuki- Wagon R+ dựa trên nền tảng thực tế.
Đây là những điều mà đồ án thiết kế, chế tạo mô hình hệ thống lái trợ lực điện của chúng em đã làm được:
- Thiết kế mạch vi điều điều khiển dùng PIC 18F4431.
- Giả cảm biến tốc độ xe.
- Tạo tín hiệu mô men.
- Dùng LED 7 đoạn thể hiện tín hiệu tốc độ xe bằng tần số.
- Dùng LED 7 đoạn thể hiện mo men xoắn bằng tần số.
- Dùng LED thể hiện hướng quay bên trái và bên phải.
- Dùng mạch công suất điều khiển động cơ D/C
3. Mục đích nghiên cứu:
Làm tài liệu tham khảo cho các bạn sinh viên,
Mặt khác, chúng em biên soạn cuốn hướng dẫn kèm theo mô hình hệ thống, với nội dung chi tiết khá đầy đủ về hệ thống lái trợ lực bằng điện nói chung và hệ thống lái trợ lực điện trên xe Suzuki wagon-R+ nói riêng.
Đồng thời trình bày chi tiết về cách thiết kế khung, mạch điện, và lập trình hoạt động trên mô hình, nhằm mô tả nguyên lý hoạt động của hệ thống, nhận dạng các chi tiết và cách kiểm tra, có cách nhìn tổng quan hơn về hệ thống.
Góp phần hiện đại hóa phương tiện và phương pháp dạy thực hành trong Giáo Dục và Đào Tạo, từng bước nâng cao trình độ của sinh viên trước khi ra trường.
4. Nội dung nghiên cứu:
Giới thiệu tổng quan về hệ thống lái thông thường.
Giới thiệu về hệ thống lái trợ lực điện.
Thiết kế mạch điều khiển và viết chương trình điều khiển.
Đi vào làm mô hình.
Hướng dẫn một số bài thực hành.
5. Đối tượng nghiên cứu:
Trọng tâm là mô hình hệ thống lái trợ lực điện.
Hệ thống điều khiển và chương trình điều khiển.
6. Phương pháp nghiên cứu.
Kết hợp nhiều phương pháp, trong đó có các phương pháp chính như:
- Nghiên cứu lý thuyết hệ thống lái trợ lực điện của các hãng.
- Nghiên cứu nguyên lý và sơ đồ mạch điện Suzuki Wagon R+.
- Tham khảo tài liệu thiết kế mạch của Khoa Cơ khí Động lực.
- Tham khảo tài liệu mô hình giảng dạy hiện có tại Khoa Cơ khí Động lực.
- Chọn lọc thông tin, học hỏi kinh nghiệm từ thầy cô, bạn bè.
- Quan sát, thực nghiệm các mô hình, đúc kết mô hình nghiên cứu.
7. Thời gian thực hiện đề tài.
Đề tài được thực hiện trong vòng 7 tuần, các công việc được bố trí như sau:
Giai đoạn 1.
Thu tập tài liệu.
Xác định nhiệm vụ, đối tượng nghiên cứu.
Xác định và phân tích mục tiêu nghiên cứu.
Thiết kế, chế tạo mạch điện điều khiển.
Thiết kế mô hình.
Thi công, chế tạo mô hình.
Giai đoạn 2.
Viết thiết minh.
Hoàn thiện đề tài.
Phần B: NỘI DUNG
Chương I: GIỚI THIỆU VỀ HỆ THỐNG LÁI
1.1. CÔNG DỤNG, PHÂN LOẠI, YÊU CẦU CỦA HỆ THỐNG LÁI.
1.1.1 Công dụng hệ thống lái.
Hệ thống lái của xe có chức năng điều khiển quỹ đạo chuyển động của xe. Việc điều khiển quỹ đạo chuyển động của xe có thể là duy trì phương chuyển động hoặc thay đổi phương chuyển động hiện tại của xe. Hai quá trình này được gọi chung là quay vòng xe. Có ba trạng thái quay vòng cơ bản: quay vòng đủ, quay vòng thừa và quay vòng thiếu.
1.1.2 Phân loại hệ thống lái.
Tuỳ thuộc vào yếu tố căn cứ để phân loại, hệ thống lái được chia thành các loại sau:
Theo cách bố trí vô lăng.
Hệ thống lái với vành lái bố trí bên trái (theo chiều chuyển động của ôtô) được dùng trên ôtô của các nước có luật đi đường bên phải như ở Việt nam và một số các nước khác.
Hệ thống lái với vành lái bố trí bên phải (theo chiều chuyển động của ôtô) được dùng trên ôtô của các nước có luật đi đường bên trái như ở Anh, Nhật, Thuỵ Điển…
Theo số lượng cầu dẫn hướng.
Hệ thống lái với các bánh dẫn hướng ở cầu trước.
Hệ thống lái với các bánh dẫn hướng ở cầu sau.
Hệ thống lái với các bánh dẫn hướng ở tất cả các cầu.
Theo kết cấu của cơ cấu lái.