M =
ray:
W.L . Mômen này làm phát sinh ra phản lực phụ N giữa thành bánh xe và cạnh
2
N = M = W.L
E 2E
Nếu N quá lớn sẽ làm cho bánh xe không quay mà chỉ trượt. Để loại trừ khả năng này, ta phải đảm bảo lực dẫn động ở mỗi bên ray thắng lực cản do ma sát khi có lực N.
W N. f
W W.L f
2 2 2E
hay
E f
L
trong đó: f - hệ số ma sát giữa thành bánh xe và cạnh ray. Trong tính toán
thường lấy
f 1 1
7 5
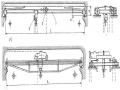
* Đặc điểm tính toán dầm chính của cầu trục
Kích thước mặt cắt tiết diện của dầm chính phải đủ lớn để đảm bảo độ bền và độ cứng. Đặc biệt, dầm cần phải đảm bảo các yêu cầu về độ cứng tĩnh và độ cứng động như sau:
- Độ vòng lớn nhất của dầm cầu dưới tác dụng của trọng lượng xe con và tải trọng nâng danh nghĩa cùng thiết bị mang vật đặt ở giữa dầm không được vượt quá giá
trị cho phép: 1 L
400
đối với cầu trục dẫn động tay; 1 L
500
đối với cầu trục một dầm
dẫn động máy và 1 L
700
đối với cầu trục hai dầm dẫn động máy.
- Đối với cầu trục có dầm hộp, phải kiểm tra thời gian dao động tắt dần của kết cấu thép theo điều kiện sau:
ttd
ln 2 ft
p.
15 s
Trong đó: ft – độ vòng tĩnh của dầm cầu tại tiết diện giữa dầm, cm;
δ – hệ số lôga giảm dao động, thường láy δ = 0,05 ÷ 0,07 tủy thuộc vào chiều cao dầm;
1 ko
2m
p – tần số dao động riêng của dầm cầu, Hz
p
ở đây: ko – độ cứng của dầm cầu, kG/cm
m – khối lượng quy dẫn của dầm cầu, kG.s2/cm
k 48EJ
o L3
m 17 Gd Gx
35 g 2g
Trong các công thức trên thì:
E – môđun đàn hồi của vật liệu chế tạo dầm, E = 2,1.106 kG/cm2; J – mômen quán tính tiết diện giữa dầm cầu, cm4;
L – khẩu độ dầm cầu, cm;
Gd – trọng lượng của một dầm cầu, kG;
Gx – trọng lượng xe con; kG
g – gia tốc trọng trường, g = 981 cm/s2.
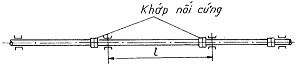
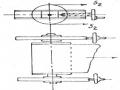
* Tính trục truyền của cơ cấu di chuyển
Trục truyền của cơ cấu di chuyển cầu trục phải được tính đầy đủ các phép tính trục thông thường như tính sơ bộ, tính độ bền, tính độ bền mỏi. Ngoài ra, tùy theo điều kiện làm việc của trục truyền mà phải kiểm tra thêm về độ cứng xoắn và dao động.
- Kiểm tra góc xoắn của trục truyền: do trục truyền có chiều dài rất lớn so với đường kính của nó nên góc xoắn của nó có thể rất lớn, đặc biệt là đối với trục truyền chậm có mômen xoắn lớn. Để tránh hiện tượng giảm tải do biến dạng khi truyền mô men xoắn Mx và tránh gây xô lệch cầu trục, góc xoắn của trục truyền không được vượt
quá 1
3
độ trên 1 m chiều dài. Góc xoắn tổng của trục truyền có chiều dài l, m, và
đường kính không đổi được xác định theo công thức:
x
M x
G.J p
Trong đó: G - mô đun chống xoắn;
4 4
Jp – mô men quán tính độc cực, đối với trục đặc có đường kính d thì Jp ≈ 0,1d4, đối với trục rỗng có đường kính ngoài là dn và đường kính trong là dt thì Jp ≈ 0,1(dn – dt ).
2
l2
EJ
m
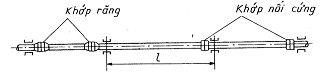
- Kiểm tra ổn định khi dao động: khi trục truyền quay nhanh, dễ có khả năng mất ổn định do dao động, tức dễ sinh ra hiện tượng cộng hưởng. Nguyên nhân cộng hưởng là tần số góc cưỡng bức từ dộng cơ truyền tới xấp xỉ bằng tần số dao động tự do
của trục truyền. Tần số dao động riêng của trục truyền là
, s-1
. Từ ω ta có
thể xác định được số vòng quay tới hạn đối với trục truyền quay nhanh;
302 EJ
l2 m
nth
Trong đó: λ – thông số dao động riêng của trục, phụ thuộc vào kết cấu nối đầu trục, lấy theo bảng 2.1;
l – chiều dài của đoạn trục truyền, cm; E – mô đun đàn hồi, kG/cm2;
J – mô men quán tính tiết diện trục, cm4;
m = G/ g.l, kG.s2/cm2 – khối lượng phân bố của trục truyền với G là trọng lượng trục truyền, kG; g = 9,81cm/s2.
Bảng 2.1. Thông số dao động riêng của trục λ
λ | |
| 3,28 |
| 3,18 |
| 3,14 |

Có thể bạn quan tâm!
-
 Vỏ Kích; 2- Thanh Răng; 3- Mũ Kích; 4- Bàn Nâng Phụ; 5 – Tay Quay; 6- Bộ Truyền Bánh Răng; 7 – Trục Dẫn; 8 – Bánh Răng; 9- Bánh Răng Cóc; 10- Cóc Hãm; 11- Đĩa
Vỏ Kích; 2- Thanh Răng; 3- Mũ Kích; 4- Bàn Nâng Phụ; 5 – Tay Quay; 6- Bộ Truyền Bánh Răng; 7 – Trục Dẫn; 8 – Bánh Răng; 9- Bánh Răng Cóc; 10- Cóc Hãm; 11- Đĩa -
 Bệ Máy; 2- Tang Cuốn Cáp; 3- Hộp Giảm Tốc; 4- Tay Gạt Điều Khiển;
Bệ Máy; 2- Tang Cuốn Cáp; 3- Hộp Giảm Tốc; 4- Tay Gạt Điều Khiển; -
 Các Phương Án Dẫn Động Cơ Cấu Di Chuyển Cầu Trục
Các Phương Án Dẫn Động Cơ Cấu Di Chuyển Cầu Trục -
 Tính Toán Kết Cấu Kim Loại Trong Cần Trục Thông Dụng
Tính Toán Kết Cấu Kim Loại Trong Cần Trục Thông Dụng -
 Đặc Tính Một Số Vật Liệu Vận Chuyển
Đặc Tính Một Số Vật Liệu Vận Chuyển -
 Máy nâng chuyển - 18
Máy nâng chuyển - 18
Xem toàn bộ 159 trang tài liệu này.
Trục truyền sẽ làm việc ổn định, an toàn khi thỏa mãn điều kiện sau:
nth
1, 2
n
ntt
1, 2
1
nth
2
Trong đó: n – số vòng quay tính toán của trục nhận từ động cơ dẫn động; ntt – số vòng quay thực tế của trục.
Để tính toán sơ bộ có thể dùng công thức:
nth
1210 d
l2
Trong đó: d- đường kính trục, cm;
l – chiều dài đoạn trục, m.
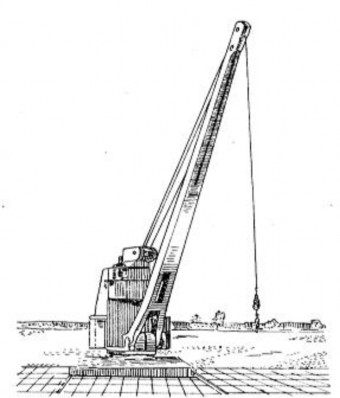
2.3.2. Cần trục quay
Cần trục quay là loại cần trục kiểu cần, đặt ở một chỗ cố định. Các chuyển động chính của cần trục gồm nâng hạ vật và quay. Cần trục có thể có tầm với không đổi hoặc thay đổi. Trong trường hợp cần trục có tầm với thay đổi thì có thêm cơ cấu thay đổi tầm với.
Cần trục quay được sử dụng phổ biến để xếp dỡ trên ô tô tải, các toa tầy hỏa, trong các xưởng cơ khí chế tạo và sửa chữa, trên công trường xây dựng…
Theo kết cấu có hai loại: cần trục cột quay và cần trục cột cố định.
a. Cần trục cột quay
Đặc điểm của loại cần trục này là kết cấu thép của cần trục quay trong các gối tựa cố định trên nền và vào kết cấu của tòa nhà. Để tiết kiệm diện tích làm việc, các gối tựa thường đặt sát tường hoặc sát các cột cố định của nhà xưởng. Cần trục cột quay có tầm với không đổi (hình 2.26) phục vụ việc nâng hà và vận chuyển hàng trên một cung tròn có bán kính bằng tầm với của cần trục. Diện tích phục vụ của cần trục cột quay có tầm với thay đổi (hình 2.25) là một hình vành khăn giới hạn bởi góc quay của cần trục, các bán kính quay là tầm với lớn nhất và nhỏ nhất của cần trục. Loại cần trục này thường dùng phương pháp thay đổi tầm với bằng xe con di chuyển trên cần nằm ngang. Cần trục cột quay có tầm với thay đổi thường dùng palăng điện có cơ cấu di chuyển chạy trên ray treo chữ I gắn trên cần để thực hiện chuyển động nâng hạ vật và thay đổi tầm với.
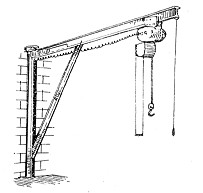
Hình 2.25: Cần trục cột quay có tầm với thay đổi
Cần trục cột quay loại nhỏ thường dùng pa lăng xích kéo tay và cơ cấu quay cũng dẫn động bằng tay hoặc không có cơ cấu quay. Trong trường hợp không có cơ cấu quay, cần trục quay được nhờ công nhân tác động trực tiếp lên vật nâng hoặc dây kéo buộc ở đầu cần.
Cơ cấu quay dẫn động máy của cần trục quay thường được đặt bên ngoài cần trục và truyền lực bằng các bộ truyền bánh răng (hình 2.26) hoặc bằng ma sát giữa cáp và vòng quay gắn trên cột (hình 2.27).
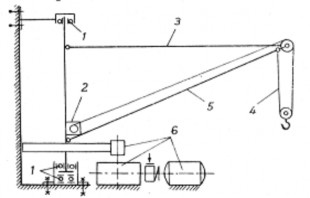
Hình 2.26: Cần trục cột quay có tầm với không đổi
1- gối tựa trên và dưới; 2- cơ cấu nâng; 3- thanh giằng cứng; 4- palăng nâng vật; 5- cần; 6- cơ cấu quay
Cơ cấu nâng của cần trục cột quay là một tời điện đảo chiều và có thể đặt trên kết cấu thép của cần trục hoặc đặt ngoài cần trục.
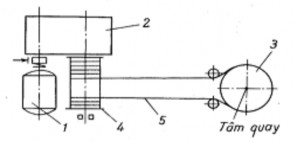
Hình 2.27: Cơ cấu quay dẫn động bằng dây cáp
1- động cơ điện; 2- hộp giảm tốc; 3- vòng quay trên cột;
4- tang; 5- cáp
Các gối tựa của cần trục cột quay phải được đặt đồng tâm theo phương thẳng đứng vì nếu có độ lệch lớn thì mô men cản quay sẽ rất lớn. Gối tựa trên thường là ổ đỡ còn gối tựa dưới là ổ đỡ chặn. Kết cấu này cho phép xác định các phản lực tại các gối tựa một cách dễ dàng theo sơ đồ tĩnh định. Các phản lực này có thể xác định bằng phương pháp giải tích hoặc phương pháp đồ thị.
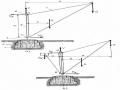
Nếu cơ cấu nâng được đặt trên kết cấu thép của cần trục (hình 2.28, a) thì các lực bên ngoài tác dụng lên kết cấu gây ra phản lực ở gối tựa là trọng lượng vật nâng Q và trọng lượng kết cấu thép cùng các cơ cấu G, mà tổng hợp lực của chúng là R. Vì R và các phản lực gối tựa A và B phải giao nhau tại một điểm nên phản lực ở gối tựa tại gối B phải nằm trên đường thẳng BO với O là điểm giao nhau giữa phương tác dụng của R và HA. Phân tích lực R theo các phương trên ta nhận được HA và B. Tiếp tục phân tích lực B theo phương ngang và phương thẳng đứng ta nhận được VB và HB (xem hình 2.28, a). Ta dễ dàng nhận thấy các phản lực ngang HA và HB bằng nhau và ngược chiều nhau khi tổng hợp lực R tác dụng theo phương thẳng đứng.
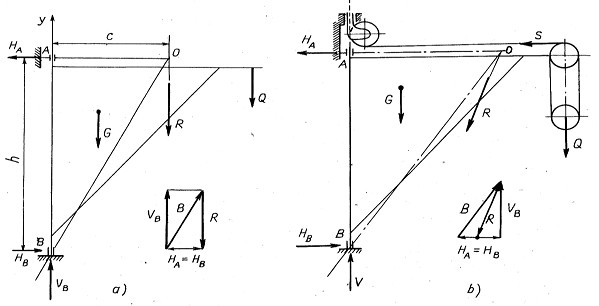
Hình 2.28: Sơ đồ cần trục cột quay
a) Cơ cấu nâng đặt trên cần trục; b) Cơ cấu nâng đặt ngoài cần trục
Trong trường hợp cơ cầu nâng đặt ngoài cần trục mà cụ thể là cáp nâng được vắt qua puly đổi hướng cáp đặt phía trên cần trục (puly này cũng quay được theo cần trục) thì lực bên ngoài tạo nên các phản lực tại các gối là G, Q, S với S là lực căng của
cáp nâng vật (hình 2.28, b). Trong trường hợp này tổng hợp lực R = G + Q + S tác
dụng theo một góc nghiêng so với phương thẳng đứng. Phân tích R thành HA và B với HA tác dụng theo phương ngang và B tác dụng theo phương BO và tiếp tục phân tích B thành HB và VB như ở hình 2.28, b. Ở đây các phản lực ngang HA và HB ngược chiều nhưng không bằng nhau.
Bằng phương pháp giải tích ta cũng dễ dàng xác định được các phản lực. Trên
sơ đồ hình 2.28, a ta có:
M A Rc H Bh 0
M B Rc H Ah 0
y R VB 0
Vậy:
H A HB
Rc
h
và VB
= R = Q + G
Gối tựa trên chịu phản lực nằm ngang nên thường là ổ đỡ. Ổ này có thể dùng ma sát trượt (hình 2.29, a) hoặc ma sát lăn (hình 2.29, b). Vỏ ngoài của ổ được gắn cứng vào tường hoặc kết cấu chịu lực của nhà xưởng.
Để bù trừ độ sai lệch do lắp đặt vỏ ngoài, ổ lăn thường dùng loại lòng cầu tự
lựa.
Ổ trên được tính toán với phản lực HA. Phần đầu cột chịu uốn và được tính cho
các mặt cắt a-a và b-b với các mô men uốn Ma-a = HA.m và Mb-b = HA.n (hình 2.29).
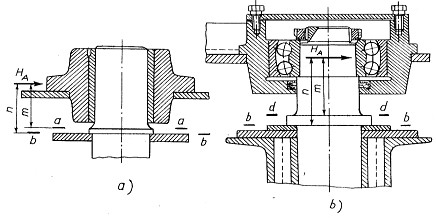
Hình 2.29: Gối tựa trên của cần trục cột quay
a) Ổ trượt; b) Ổ lăn
Vỏ ngoài của ổ trên là một kết cấu đúc hàn. Kết cấu hàn của vỏ ổ (hình 2.30) gồm 2 đế liên kết với phần chịu lực của nhà xưởng bằng bulông 3, các thanh thép góc 1 và 5 có một đầu hàn với đế 2, còn đầu kia hàn với vỏ ổ trên 4. Nội lực trong các thanh thép góc 1, 5 và phản lực tại các bu lông 3 phụ thuộc vào vị trí của cần tức góc quay θ của cần trục.
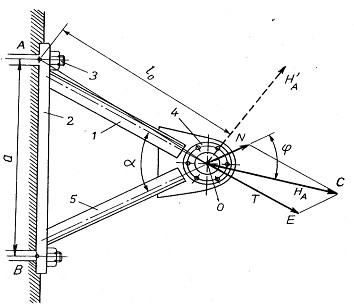
Hình 2.30: Kết cấu gối đỡ trên
Thực tế các thanh thép góc 1, 5 nối cứng với đế 2 và vỏ 4 tạo thành hệ siêu tĩnh song ta có thể coi chúng nối khớp với nhau, các thanh 1, 5 chỉ chịu lực kéo nén và dễ dàng tính được nội lực của các thanh 1, 5 dưới tác dụng của phản lực HA tại một vị trí của cần. Phản lực lớn nhất dùng để tính bulông tại B được xác định bằng cách lấy mômen tại A và phản lực H’A ở vị trí vuông góc với OA (hình 2.30). Vậy lực để tính
bu lông là
P H 'A .lo
Gối tựa dưới của cần trục chịu phản lực ngang HB và phản lực thẳng đứng V nên nó gồm các ổ chặn (hình 2.31). Loại ổ lăn (hình 2.31, b) được sử dụng phổ biến
hơn. Ổ đỡ thường dùng loại lòng cầu tự lựa và phần tựa của ổ chặn cũng có hình cầu để không ảnh hưởng đến quá trình làm việc của ổ chặn. Ngoài ra phần đỡ hình cầu của ổ chặn có bán kính sao cho tâm của nó trùng với tâm của lòng cầu tự lựa trên ổ đỡ (hình 2.31, b). Vì tốc độ quay của cần trục rất chậm nên ổ đỡ và ổ chặn được tính với tải trọng tĩnh bằng các phản lực HB và VB. Phần đuôi của cột chịu uốn và nén và được tính toán cho các mặt cắt a-a và b-b.
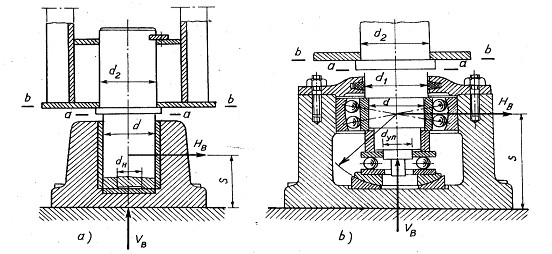
Hình 2.31: Gối tựa dưới của cần trục cột quay:
a) Ổ trượt; b) Ổ lăn
Tính toán cơ cấu nâng vật, cơ cấu quay, cơ cấu thay đổi tầm với bằng di chuyển xe con trên cần nằm ngang và kết cấu thép của cần trục không có gì đặc biệt.
b. Cần trục cột cố định
Hình 2.32: Cần trục cột cố định có tầm với thay đổi