LỜI MỞ ĐẦU
Nguyên lý máy và chi tiết máy là hai trong những môn học nền tảng được giảng dạy trong các trường Đại học, cao đẳng kỹ thuật. Nó không những là cơ sở cho hàng loạt các môn chuyên ngành cơ khí mà còn xây dựng tiềm lực tư duy khoa học cho các kỹ sư và cán bộ khoa học tương lai.
Ngày nay, để đáp ứng những đòi hỏi mới về chất lượng đào tạo đạt chuẩn trong khu vực đặc biệt về đào tạo giáo viên dạy nghề (RAVTE). Trường ĐHSPKT Nam Định đang chỉ đạo tiến hành cải cách một cách sâu rộng việc giảng dạy, học tập theo quy trình đào tạo mới (hệ thống tín chỉ), trong đó học phần Nguyên lý – Chi tiết máy 1 được đưa vào giảng dạy cho sinh viên học các chuyên ngành cơ khí, sau khi đã học xong các môn học cơ bản, Hình họa – vẽ kỹ thuật, Dung sai – đo lường, Cơ học 1, Vật liệu kỹ thuật 1...
Tập bài giảng Nguyên lý – Chi tiết máy 1 biên soạn với khối lượng 2 tín chỉ gồm hai phần: Nguyên lý máy và chi tiết máy.
Phần A. Nguyên lý máy: Nghiên cứu vấn đề chuyển động và điều khiển chuyển động của cơ cấu và máy. Ba vấn đề chung của các loại cơ cấu và máy mà phần Nguyên lý máy nghiên cứu là vấn đề về cấu trúc, động học và động lực học, được nghiên cứu dưới dạng: bài toán phân tích và bài toán tổng hợp
Phần B. Chi tiết máy: Nghiên cứu các liên kết cố định được sử dụng do sự cần thiết đơn giản hóa việc chế tạo, giảm nhẹ lắp ráp, sửa chữa, vận chuyển...Trong Chế tạo máy các liên kết cố định được gọi là các mối ghép.
Tập bài giảng Nguyên lý – Chi tiết máy 1 là tài liệu chính phục vụ cho công tác giảng dạy của giảng viên và học tập của sinh viên đại học, cao đẳng ngành Cơ khí trong trường ĐHSPKT Nam Định.
Trong quá trình biên soạn, nhóm tác giả đã cố gắng sử dụng những hiểu biết và kinh nghiệm cũng như thực tế Việt Nam tích lũy được trong hàng chục năm công tác giảng dạy và thực tiễn, đồng thời tham khảo chương trình giảng dạy cũng như các sách giáo khoa về Nguyên lý máy và chi tiết máy ở các trường đại học xuất bản trong những năm gần đây.
Nhằm ngày càng hoàn thiện nội dung tập bài giảng Nguyên lý – Chi tiết máy 1 chúng tôi mong nhận được nhiều góp ý của độc giả, xin gửi về địa chỉ: Bộ môn Kỹ thuật cơ sở, Khoa Cơ khí, Trường Đại học Sư phạm Kỹ thuật Nam Định.
Có thể bạn quan tâm!
-
 Nguyên lý chi tiết máy 1 - 2
Nguyên lý chi tiết máy 1 - 2 -
 Công Thức Tính Bậc Tự Do Của Cơ Cấu Phẳng
Công Thức Tính Bậc Tự Do Của Cơ Cấu Phẳng -
 Họa Đồ Chuyển Vị Của Cơ Cấu Và Đồ Thị Chuyển Vị S(Φ)
Họa Đồ Chuyển Vị Của Cơ Cấu Và Đồ Thị Chuyển Vị S(Φ)
Xem toàn bộ 167 trang tài liệu này.
NHÓM TÁC GIẢ
MỤC LỤC
LỜI MỞ ĐẦU 1
MỤC LỤC 2
PHẦN A 6
CHƯƠNG1. CẤU TRÚC CƠ CẤU 5
1.1. Khái niệm và định nghĩa 5
1.1.1. Khâu và chi tiết máy 5
1.1.2. Nối động, thành phần khớp động và khớp động 6
1.1.3. Các loại khớp động và lược đồ khớp 8
1.1.4. Kích thước động của khâu và lược đồ khâu 12
1.1.5. Chuỗi động và cơ cấu 12
1.2. Bậc tự do của cơ cấu phẳng 15
1.2.1 Khái niệm bậc tự do của cơ cấu 15
1.2.2. Công thức tính bậc tự do của cơ cấu 16
1.2.2. Công thức tính bậc tự do của cơ cấu phẳng 17
1.2.3. Khâu dẫn – Khâu bị dẫn – Khâu phát động 20
1.3. Xếp hạng cơ cấu phẳng 21
1.3.1. Nhóm Atxua – Hạng của nhóm 21
1.3.2. Hạng của cơ cấu 23
BÀI TẬP CHƯƠNG 1 24
CÂU HỎI ÔN TẬP CHƯƠNG 1 27
CHƯƠNG 2. PHÂN TÍCH ĐỘNG HỌC CƠ CẤU PHẲNG 28
2.1. Bài toán vị trí (chuyển vị) và quỹ đạo 28
2.2. Bài toán vận tốc 30
2.3. Bài toán gia tốc 34
BÀI TẬP CHƯƠNG 2 40
CHƯƠNG 3. PHÂN TÍCH LỰC TRÊN CƠ CẤU PHẲNG 46
3.1. Lực tác động trên cơ cấu 46
3.1.1. Ngoại lực 46
3.1.2. Lực quán tính 46
3.1.3. Phản lực khớp động 46
3.2. Số liệu cho trước, giả thiết và nội dung của bài toán phân tích lực cơ cấu 47
3.3. Nguyên tắc và trình tự giải bài toán phân tích lực cơ cấu 48
3.3.1. Nguyên lý Đalămbe 48
3.3.2. Điều kiện tĩnh định của bài toán phân tích áp lực khớp động 49
3.3.3. Trình tự và ví dụ giải bài toán phân tích áp lực khớp động 50
3.3.4. Phương pháp di chuyển khả dĩ để tính 𝑴𝒄𝒃 hay 𝑷𝒄𝒃 54
CÂU HỎI ÔN TẬP CHƯƠNG 3 54
CHƯƠNG 4. MA SÁT TRONG KHỚP ĐỘNG 55
4.1. Đại cương 55
4.1.1. Khái niệm 55
4.1.2. Ma sát trượt khô – Định luật Coulomb 55
4.1.3. Ma sát lăn 59
4.2. Ma sát trượt khô trong khớp trượt 64
4.2.1. Ma sát trong rãnh hình tam giác 64
4.2.2. Ma sát trên mặt phẳng nghiêng 65
4.2.3. Ma sát trên rãnh nghiêng hình tam giác 66
4.2.4. Ma sát trong khớp ren vít 68
4.3. Ma sát trượt trong khớp quay 70
4.3.1. Mô men ma sát trong khớp quay 71
N
F
4.3.2. Tính phản lực và tổng lực ma sát 73
4.3.3. Vòng tròn ma sát và hiện tượng tự hãm trong khớp quay 76
4.3.4. Các trường hợp cụ thể của khớp quay 78
4.4. Ma sát trong khớp quay chặn 81
4.4.1. Khớp quay chặn còn mới (ổ chặn) 82
4.4.2. Khớp quay chặn đã chạy mòn 83
CÂU HỎI ÔN TẬP CHƯƠNG 4 84
PHẦN B 85
CHI TIẾT MÁY 85
CHƯƠNG 5. CÁC CHI TIẾT MÁY GHÉP 85
5.1. Ghép bằng đinh tán 85
5.1.1. Khái niệm chung 85
5.1.2 . Tính mối ghép chắc 88
5.1.3. Tính mối ghép chắc kín 91
5.1.4. Hệ số bền của mối ghép 92
5.1.5. Xác định ứng suất cho phép 92
5.2.Ghép bằng hàn 93
5.2.1. Khái niệm chung 93
5.2.2. Kết cấu mối hàn 96
5.2.3. Tính mối ghép hàn giáp mối; chồng; góc 98
5.2.4. Tính mối hàn tiếp xúc 102
5.2.5. Độ bền của mối hàn và ứng suất cho phép 104
5.2.6. Thí dụ 106
5. 3. Ghép bằng độ dôi 107
5. 3.1. Khái niệm chung 107
5.3.2. Tính mối ghép 110
5.4. Mối ghép then, then hoa và trục định hình 114
5.4.1 Mối ghép then 114
5.4.2. Mối ghép then hoa 119
5.4.3. Mối ghép bằng trục định hình 123
5.5. Mối ghép bằng ren 124
5.5.1. Khái niệm chung 124
5.5.2. Tính mối ghép ren 130
5.5.3. Tính mối ghép nhóm bu lông 139
CÂU HỎI ÔN TẬP CHƯƠNG 5 149
CHƯƠNG 6. PHÂN TÍCH CHỌN MỐI GHÉP 151
6.1. Mối ghép ren 151
6.1.1. Ưu điểm 151
6.1.2. Nhược điểm 151
6.1.3. Phạm vi sử dụng 151
6.2. Mối ghép đinh tán 151
6.2.1. Ưu điểm 151
6.2.2. Nhược điểm 151
6.2.3. Phạm vi sử dụng 152
6.3. Mối ghép hàn 152
6.3.1. Ưu điểm 152
6.3.2. Nhược điểm 152
6.3.3. Phạm vi sử dụng 152
6.4. Mối ghép độ dôi 153
6.4.1. Ưu điểm 153
6.4.2. Nhược điểm 153
6.4.3. Phạm vi sử dụng 153
6.5. Mối ghép then, then hoa và trục định hình 153
6.5.1. Ưu điểm 153
6.5.2. Nhược điểm 153
6.5.3. Phạm vi sử dụng 153
CÂU HỎI ÔN TẬP CHƯƠNG 6 154
TÀI LIỆU THAM KHẢO 155
PHẦN THỨ NHẤT NGUYÊN LÝ MÁY
CHƯƠNG 1 CẤU TRÚC CƠ CẤU
1.1. Khái niệm và định nghĩa
1.1.1. Khâu và chi tiết máy
a. Ví dụ về máy và cơ cấu
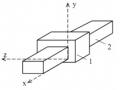
Xét động cơ đốt trong kiểu pistông – tay quay được dùng để biến đổi năng lượng của khí cháy bên trong xilanh (nhiệt năng, hóa năng) thành cơ năng trên trục khuỷu (máy này được gọi là máy năng lượng- hình 1.1)
Hình 1.1. Máy năng lượng
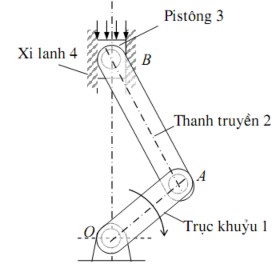
Động cơ đốt trong bao gồm nhiều cơ cấu. Cơ cấu chính trong máy là cơ cấu tay quay – con trượt OAB (hình 1.2) làm nhiệm vụ biến chuyển tịnh tiến của pistông (3) thành chuyển động quay của trục khuỷu (1).
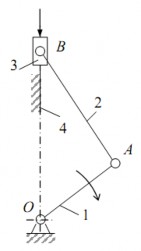
Hình 1.2. Cơ cấu tay quay – con trượt
b. Khâu và chi tiết máy.
+ Máy và cơ cấu gồm nhiều bộ phận có chuyển động tương đối với nhau. Mỗi bộ phận có chuyển động riêng biệt này của máy được gọi là một khâu.
Khâu có thể là một vật rắn không biến dạng, vật rắn biến dạng (ví dụ lò xo…) hoặc có dạng day dẻo (ví dụ dây đai trong bộ truyền đai…).
Trong toàn bộ giáo trình, trừ những trường hợp đặc biệt ta xem khâu như là một vật rắn không biến dạng (vật rắn tuyệt đối)
+ Khâu có thể là một chi tiết máy độc lập hay do một số chi tiết máy ghép cứng lại với nhau. Mỗi chi tiết máy là một bộ phận hoàn chỉnh, không thể tháo rời nhỏ hơn được nữa của máy.
c. Ví dụ
Cơ cấu tay quay con trượt OAB (hình 1.2) có 4 khâu: Trục khuỷu (1), thanh truyền (2), pistông (3) và xi lanh (4) gắn liền với vỏ máy. Trong hệ quy chiếu gắn liền với khâu (4) (vỏ máy, xi lanh), mỗi khâu có chuyển động riêng biệt. Khâu (1) quay xung quanh tâm O, khâu (2) chuyển động song phẳng, khâu (3) chuyển động tịnh tiến, khâu (4) cố định.
Trục khuỷu thông thường là một chi tiết máy độc lập. Thanh truyền gồm nhiều chi tiết máy như thân, bạc lót, đầu to, bu lông, đai ốc…ghép cứng lại với nhau.
1.1.2. Nối động, thành phần khớp động và khớp động
a. Bậc tự do tương đối giữa hai khâu.
+ Số bậc tự do tương đối giữa hai khâu là số khả năng chuyển động độc lập tương đối của khâu này đối với khâu kia (tức là số khả năng chuyển động độc lập của khâu này trong một hệ quy chiếu gắn liền với khâu kia).
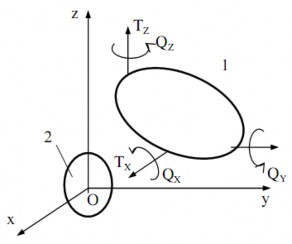
Hình 1.3. Hai khâu trong không gian
+ Khi để rời hai khâu trong không gian, giữa chúng sẽ có 6 bậc tự do tương đối.
Thật vậy, trong hệ tọa độ vuông góc Oxyz gắn liền với khâu (1), khâu (2) có 6 khả năng chuyển động: Tx, Ty, Tz (chuyển động tịnh tiến dọc theo các trục Ox, Oy, Oz) và Qx, Qy, Qz (chuyển động quay xung quanh các trục Ox, Oy, Oz). Sáu khả năng này hoàn toàn độc lập với nhau (hình 1.3).
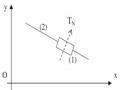
+ Tuy nhiên, khi để rời hai khâu trong mặt phẳng, số bậc tự do tương đối giữa chúng chỉ còn lại là 3: chuyển động quay Qz xung quanh trục Oz vuông góc với mặt phẳng chuyển động Oxy của hai khâu và chuyển động tịnh tiến Tx, Ty dọc theo các trục Ox, Oy nằm trong mặt phẳng này (hình 1.4).
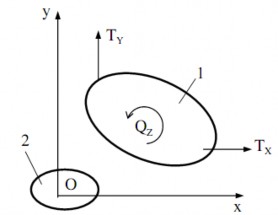
Hình 1.4. Hai khâu trong mặt phẳng
+ Số bậc tự do tương đối giữa hai khâu cũng chính là số thông số vị trí độc lập cần cho trước để xác định hoàn toàn vị trí của khâu này trong một hệ quy chiếu gắn liền với khâu kia (hình 1.5).
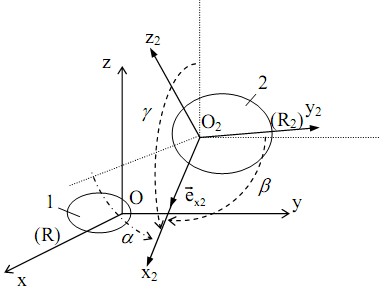
Hình 1.5. Bậc tự do hai khâu
Thật vậy, để xác định hoàn toàn vị trí của khâu (2) trong hệ quy chiếu R gắn liền với khâu (1), nghĩa là để xác định hoàn toàn vị trí của hệ quy chiếu R2 gắn liền với khâu (2) so với hệ quy chiếu R, cần biết 6 thông số:
+ Ba tọa độ Xo2, Yo2, Zo2 của gốc O2 của hệ quy chiếu R2 trong hệ R.
ex
+ Ba góc chỉ phương α, β, γ xác định phương chiếu của vectơ định vị
2
của
trục O2x2 của hệ R2 trong hệ R.
b. Nối động, thành phần khớp động, khớp động
+ Để tạo thành cơ cấu, người ta phải tập hợp các khâu lại với nhau bằng cách thực hiện các phép nối động. Nối động hai khâu là bắt chúng tiếp xúc với nhau theo một quy cách nhất định trong suốt quá trình chuyển động. Nối động hai khâu làm hạn chế bớt số bậc tự do tương đối giữa chúng.
+ Chỗ trên mỗi khâu tiếp xúc với khâu được nối động với nó gọi là thành phần khớp động.
+ Tập hợp hai thành phần khớp động của hai khâu trong một phép nối động gọi là một khớp động.
1.1.3. Các loại khớp động và lược đồ khớp
a. Các loại khớp động
+ Căn cứ vào số bậc tự do tương đối bị hạn chế đi khi nối động (còn gọi là số ràng buộc của khớp), ta phân khớp động thành các loại, khớp loại 1, loại 2, loại 3, loại 4, loại 5 lần lượt hạn chế 1, 2, 3, 4, 5 bậc tự do tương đối. Không có khớp loại 6, vì khớp này hạn chế 6 bậc tự do tương đối giữa hai khâu, khi đó hai khâu là ghép cứng với nhau. Không có khớp loại 0, vì khi đó hai khâu để rời hoàn toàn trong không gian (liên kết giữa hai khâu lúc này được gọi là liên kết tự do).
+ Căn cứ vào đặc điểm tiếp xúc của hai khâu khi nối động, ta phân khớp động thành các loại: khớp cao nếu thành phần khớp động là các điểm hay các đường (hai khâu tiếp xúc nhau theo điểm hoặc đường). Khớp thấp nếu thành phần khớp động là các mặt (hai khâu tiếp xúc nhau theo mặt).
b. Ví dụ về khớp động
+ Ví dụ 1:
Cho hình trụ tròn xoay (khâu 1) tiếp xúc với tấm phẳng (khâu 2) theo một đường sinh, ta được một khớp động ( hình 1.6).
Hình 1.6. Khớp cao