đó có thể đo khối lượng không khí nạp bằng cách phát hiện dòng điện đó. Trong trường hợp của cảm biến lưu lượng khí nạp kiểu dây sấy, dòng điện này được biến đổi thành một điện áp, sau đó được truyền đến ECU động cơ từ cực VG.
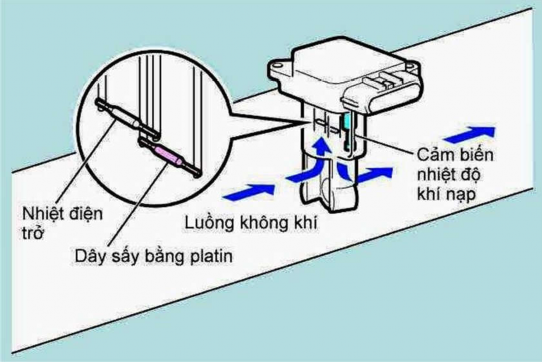
Hình 6.10 Cảm biến dây sấy
+ .Mạch bên trong
Trong cảm biến lưu lượng khí nạp thực tế, như trình bày ở hình minh họa, một dây sấy được ghép vào mạch cầu. Mạch cầu này có đặc tính là các điện thế tại điểm A và B bằng nhau khi tích của điện trở theo đường chéo bằng nhau ([Ra+R3]*R1=Rh*R2). Khi dây sấy này (Rh) được làm mát bằng không khí nạp, điện trở tăng lên dẫn đến sự hình thành độ chênh giữa các điện thế của các điểm A và B. Một bộ khuếch đại xử lý phát hiện chênh lệch này và làm tăng điện áp đặt vào mạch này (làm tăng dòng điện chạy qua dây sấy (Rh). Khi thực hiện việc này, nhiệt độ của dây sấy (Rh) lại tăng lên dẫn đến việc tăng tương ứng trong điện trở cho đến khi điện thế của các điểm A và B trở nên bằng nhau (các điện áp của các điểm A và B trở nên cao hơn). Bằng cách sử dụng các đặc tính của loại mạch cầu này, cảm biến lưu lượng khí nạp có thể đo được khối lượng không khí nạp bằng cách phát hiện điện áp ở điểm B.
Hình 6.11 Mạch điện cảm biến dây sấy
Có thể bạn quan tâm!
-

 Hệ thống phun xăng điện tử trường cđ nghề Đà Nẵng - 1
Hệ thống phun xăng điện tử trường cđ nghề Đà Nẵng - 1 -
 Hệ thống phun xăng điện tử trường cđ nghề Đà Nẵng - 2
Hệ thống phun xăng điện tử trường cđ nghề Đà Nẵng - 2 -
 Hiện Tượng, Nguyên Nhân Sai Hỏng Và Phương Pháp Kiểm Tra, Bảo Dưỡng Bơm Xăng Điều Khiển Điện Tử.
Hiện Tượng, Nguyên Nhân Sai Hỏng Và Phương Pháp Kiểm Tra, Bảo Dưỡng Bơm Xăng Điều Khiển Điện Tử. -
 Nhiệm Vụ, Phân Loại, Cấu Tạo Và Nguyên Lý Làm Việc Của Vòi Phun Xăng Điều Khiển Điện Tử
Nhiệm Vụ, Phân Loại, Cấu Tạo Và Nguyên Lý Làm Việc Của Vòi Phun Xăng Điều Khiển Điện Tử -
 Nhiệm Vụ, Cấu Tạo, Nguyên Lý Làm Việc Của Các Bộ Cảm Biến
Nhiệm Vụ, Cấu Tạo, Nguyên Lý Làm Việc Của Các Bộ Cảm Biến -
 Hệ thống phun xăng điện tử trường cđ nghề Đà Nẵng - 7
Hệ thống phun xăng điện tử trường cđ nghề Đà Nẵng - 7
Xem toàn bộ 56 trang tài liệu này.
2.3.1 Cảm biến áp suất tuyệt đối trên đường ống nạp (MAP - Manifold Absolute Pressure sensor)
Khác với L-Jetronic, trên hệ thống phun xăng loại D-Jetronic lượng khí nạp đi vào xylanh được xác định gián tiếp (phải tính lại) thông qua cảm biến đo áp suất tuyệt đối trên đường ống nạp.
Khi tải thay đổi, áp suất tuyệt đối trong đường ống nạp sẽ thay đổi và MAP sensor sẽ chuyển thành tín hiệu điện thế báo về ECU để tính ra lượng không khí đi vào xylanh. Sau đó, dựa vào giá trị này ECU sẽ điều khiển thời gian mở kim phun và thời điểm đánh lửa.
+ Cấu tạo và nguyên lý hoạt động:
Loại cảm biến này dựa trên nguyên lý cầu Wheatstone. Mạch cầu Wheatstone được sử dụng trong thiết bị nhằm tạo ra một điện thế phù hợp với sự thay đổi điện trở.
Cảm biến bao gồm một tấm silicon nhỏ (hay gọi là màng ngăn) dày hơn ở hai mép ngoài (khoảng 0,25 mm) và mỏng ở giữa (khoảng 0,025 mm). Hai mép được làm kín cùng với mặt trong của tấm silicon tạo thành buồng chân không trong cảm biến. Mặt
ngoài tấm silicon tiếp xúc với áp suất đường ống nạp. Hai mặt của tấm silicon được phủ thạch anh để tạo thành điện trở áp điện (Piezoresistor).
1
1. Mạch bán dẫn
2. Buồng chân không
3. Giắc cắm
4. Lọc khí
5. Đường ống nạp
2
3
4
5
Hình 6.12: Cảm biến áp suất đường ống nạp
+ Mạch điện
VC
VC ECU 5V
PIM PIM
E2 E2
IC
E1
Hình 6.13: Mạch điện cảm biến áp xuất đường ống nạp
2.3.2 Cảm biến vị trí piston (TDC sensor hay còn gọi là cảm biến G)
Dùng để báo cho ECU biết vị trí tử điểm thượng hoặc trước tử điểm thượng của piston. Trong một số trường hợp, chỉ có vị trí của piston xylanh số 1 (hoặc số 6) được báo về ECU, còn vị trí các xylanh còn lại sẽ được tính toán. Công dụng của cảm biến này là để ECU xác định thời điểm đánh lửa và cả thời điểm phun. Vì vậy, trong nhiều hệ thống điều khiển động cơ, số xung phát ra từ cảm biến phụ thuộc vào kiểu phun (độc lập, nhóm hay đồng loạt) và thường bằng số lần phun trong một chu kỳ.
2.3.3 Cảm biến tốc độ động cơ (Engine speed ; crankshaft angle sensor hay còn gọi là tín hiệu NE)
Dùng để báo tốc độ động cơ để tính toán hoặc tìm góc đánh lửa tối ưu và lượng nhiên liệu sẽ phun cho từng xylanh. Cảm biến này cũng được dùng vào mục đích điều khiển tốc độ cầm chừng hoặc cắt nhiên liệu ở chế độ cầm chừng cưỡng bức.
Có nhiều cách bố trí cảm biến G và NE trên động cơ: trong delco, trên bánh đà, hoặc trên bánh răng cốt cam. Đôi khi ECU chỉ dựa vào một xung lấy từ cảm biến hoặc IC đánh lửa để xác định vị trí piston lẫn tốc độ trục khuỷu.
Cảm biến vị trí xylanh và cảm biến tốc độ động cơ có nhiều dạng khác nhau như: cảm biến điện từ loại nam châm quay hoặc đứng yên, cảm biến quang, cảm biến Hall...
+ Loại dùng cảm biến điện từ
a. Cấu tạo
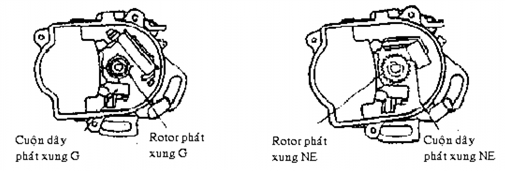
Hình 6.14: Sơ đồ bố trí cảm biến G và NE trên xe TOYOTA
Trên hình 6.14 trình bày sơ đồ bố trí của cảm biến vị trí xylanh và tốc độ động cơ dạng điện từ trên xe Toyota loại nam châm đứng yên. Mỗi cảm biến gồm có rotor để khép mạch từ và cuộn dây cảm ứng mà lõi gắn với một nam châm vĩnh cửu đứng yên. Số răng trên rotor và số cuộn dây cảm ứng thay đổi tùy thuộc vào loại động cơ. Phần tử phát xung G có thể có 1; 2; 4 hoặc 6, còn phần tử phát xung NE có thể có 4; 24 hoặc sử dụng số răng của bánh đà. Ở đây ta xem xét cấu tạo và hoạt động của bộ tạo tín hiệu G và NE loại một cuộn cảm ứng – một rotor 4 răng cho tín hiệu G và một cuộn cảm ứng - một rotor 24 răng cho tín hiệu NE. Hai rotor này gắn đồng trục với bộ chia điện, bánh răng tín hiệu G nằm trên, còn bánh răng phát tín hiệu NE phía dưới.
Nam châm vĩnh
Cuộn
dây
Rotor
Hình 6.15: Sơ đồ nguyên lý của loại dùng cảm biến điện từ
b. Nguyên lý hoạt động (xem hình 6.31)
Bộ phận chính của cảm biến là một cuộn cảm ứng, một nam châm vĩnh cửu và một rotor dùng để khép mạch từ có số răng tùy loại dộng cơ. Khi cựa răng của rotor không nằm đối diện cực từ, thì từ thông đi qua cuộn dây cảm ứng sẽ có giá trị thấp vì khe hở không khí lớn nên có từ trở cao. Khi một cựa răng đến gần cực từ của cuộn dây, khe hở không khí giảm dần khiến từ thông tăng nhanh. Như vậy, nhờ sự biến thiên từ thông, trên cuộn dây sẽ xuất hiện mộ sức điện động cảm ứng. Khi cựa răng rotor đối diện với cực từ của cuộn dây, từ thông đạt giá trị cực đại nhưng điện áp ở hai đầu cuộn dây bằng không. Khi cựa răng rotor di chuyển ra khỏi cực từ, thì khe hở không khí tăng dần làm từ thông giảm sinh ra một sức điện động theo chiều ngược lại.
Tín hiệu G
Cuộn cảm nhận tín hiệu G, gắn trên thân của bộ chia điện. Rotor tín hiệu G có 4 răng sẽ cho 4 xung dạng sin cho mỗi vòng quay của trục cam. Xem hình 6.32.
Tín hiệu NE
Tín hiệu NE được tạo ra trong cuộn cảm cùng nguyên lý như tín hiệu G. Điều khác nhau duy nhất là rotor của tín hiệu NE có 24 răng. Cuộn dây cảm biến sẽ phát 24 xung trong mỗi vòng quay của delco.
Mạch điện và dạng xung
+ Tín hiệu G (1 cuộn kích 4 răng)
Tín hiệu NE (1 cuộn kích 24 răng).
G
Tín hiệu G
G
G-
NE
NE
1. Ignite
r
Engine ECU
180o CA
Tín hiệu NE
Hình 6.16: Sơ đồ mạch điện và dạng tín hiệu xung G và NE.
+ Tín hiệu NE (2 cuộn kích, 4 răng)
NE
NE-
NE
Engine ECU
180o CA
Tín hiệu NE
Hình 6.17: Sơ đồ mạch điện và dạng tín hiệu xung 4 răng
2.3.4 Cảm biến vị trí cánh bướm ga
Nhiệm vụ, cấu tạo, vị trí lắp đặt và nguyên lý làm việc.
+ Nhiệm vụ
Cảm biến vị trí bướm ga được lắp trên cổ họng gió và được dẫn động cơ khí với trục bướm ga. Cảm biến này có nhiệm vụ phát hiện góc mở của bướm ga và biến đổi góc mở bướm ga thành điện áp, được truyền đến ECU động cơ như tín hiệu mở bướm ga (VTA). Căn cứ vào những tín hiệu này ECU sẽ tính toán để hiệu chỉnh tỷ lệ khí nhiên liệu cho phù hợp với điều kiện làm việc của động cơ, hiệu chỉnh tăng công suất khi bướm ga mở và điều khiển ngắt nhiên liệu khi giảm ga. Hiện nay có 2 loại cảm biến bướm ga đang được sử dụng là:
Loại tuyến tính
Như trình bày trong hình minh họa, cảm biến này gồm có 2 con trượt và một điện trở, và các tiếp điểm cho các tín hiệu IDL và VTA được cung cấp ở các đầu của mỗi tiếp điểm. Khi tiếp điểm này trượt dọc theo điện trở đồng thời với góc mở bướm ga, điện áp này được đặt vào cực VTA theo tỷ lệ thuận với góc mở của bớm ga. Khi bướm ga được đóng lại hoàn toàn, tiếp điểm của tín hiệu IDL được nối với các cực IDL và E2. Các cảm biến vị trí bướm ga loại tuyến tính hiện nay có các kiểu không có tiếp điểm IDL hoặc các kiểu có tiếp điểm IDL nhưng nó không được nối với ECU động cơ. Các kiểu này dùng tín hiệu VTA để thực hiện việc điều khiển đã nhớ và phát hiện trạng thái chạy không tải.
Một số kiểu sử dụng tín hiệu ra hai hệ thống (VTA1, VTA2) để tăng độ tin cậy khi làm việc.
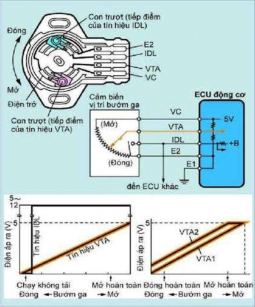
Hình 6.18 Cảm biến vị trí cánh bướm ga
+ Loại phần tử Hall
Cảm biến vị trí bướm ga loại phần tử Hall gồm có các mạch IC Hall làm bằng các phần tử Hall và các nam châm quay quanh chúng. Các nam châm đ- ược lắp ở trên trục bớm ga và quay cùng với bướm ga. Khi bớm ga mở, các nam châm quay cùng một lúc, và các nam châm này thay đổi vị trí của chúng. Vào lúc đó, IC Hall phát hiện sự thay đổi từ thông gây ra bởi sự thay đổi của vị trí nam châm và tạo ra điện áp ra của hiệu ứng Hall từ các cực VTA1 và VTA2 theo mức thay đổi này. Tín hiệu này được truyền đến
ECU động cơ như tín hiệu mở bớm ga. Cảm biến này không chỉ phát hiện chính xác độ mở của bớm ga, mà còn sử dụng phương pháp không tiếp điểm và có cấu tạo đơn giản, vì thế nó không dễ bị hỏng. Ngoài ra, để duy trì độ tin cậy của cảm biến này, nó phát ra các tín hiệu từ hai hệ thống có các tính chất khác nhau.
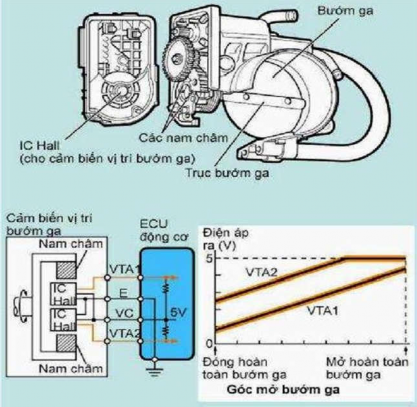
Hình 6.19 Cảm biến vị trí cánh bướm galoại Hall
3. Hiện tượng nguyên nhân sai hỏng của mô đun điều khiển điện tử và các bộ cảm biến
+ Hiện tượng động cơ bị chết máy khi nhấn ga.
- Nguyên nhân: Cảm biến lưu lượng gió,cảm biến nhiệt độ nước làm mát điện trở và điện áp sai.
+ Hiện tượng động cơ bị chết máy khi nhả chân ga
-Nguyên nhân:cảm biến lưu lượng gió hoạt động không đúng
+ Hiện tượng động cơ bị chết máy nhưng không thể khởi động lại
+ Hiện tượng:có cháy nhưng động cơ không khởi động
- Nguyên nhân:Cảm biến lưu lượng gió,cảm biến nhiệt độ nước điện trở hay điện áp không đúng, hay có hiện tượng hở hay ngắn mạch