Qua hai phương án thiết kế ta thấy cả hai phương án đều thoả mản tuy nhiên ta phải chọn phương án 1 vì phương án này làm bộ truyền đai có kích thước nhỏ gọn
.Vậy ta đã thiết kế bộ truyền đai với các thông số hình học
Câu hỏi ôn tập chương 3
Câu 3.1
Nêu cấu tạo chính, ưu nhược điểm và phạm vi sử dụng của truyền động đai. Có
vẽ hình minh hoạ.
Câu 3.2
Nêu các loại truyền động đai. Có vẽ hình minh hoạ.
Câu 3.3
Nêu các loại dây đai. Có vẽ hình minh hoạ.
Có thể bạn quan tâm!
-
 Cách Xác Định Ứng Suất Sinh Ra Trong Chi Tiết Máy
Cách Xác Định Ứng Suất Sinh Ra Trong Chi Tiết Máy -
 Các Dạng Hỏng Của Bộ Truyền Đai Và Chỉ Tiêu Tính Toán
Các Dạng Hỏng Của Bộ Truyền Đai Và Chỉ Tiêu Tính Toán -
 Tính Bộ Truyền Đai Theo Ứng Suất Có Ích
Tính Bộ Truyền Đai Theo Ứng Suất Có Ích -
 Tính Bộ Truyền Bánh Ma Sát Bằng Vật Liệu Kim Loại
Tính Bộ Truyền Bánh Ma Sát Bằng Vật Liệu Kim Loại -
 Thông Số Hình Học Của Bộ Truyền Bánh Răng Trụ Răng Nghiêng
Thông Số Hình Học Của Bộ Truyền Bánh Răng Trụ Răng Nghiêng -
 Các Dạng Hỏng Và Chỉ Tiêu Tính Toán Bộ Truyền Bánh Răng
Các Dạng Hỏng Và Chỉ Tiêu Tính Toán Bộ Truyền Bánh Răng
Xem toàn bộ 207 trang tài liệu này.
Câu 3.4
Nêu các thông số hình học chính của truyền động đai. Có vẽ hình minh hoạ.
Câu 3.5
Trình bày ứng suất trong đai. Có vẽ hình minh hoạ.
Câu 3.6
Vẽ đồ thị đường cong trượt. Qua đồ thị giải thích tại sao bộ truyền đai làm việc có lợi nhất khi ψ = ψ0 .
Câu 3.7
Trình bày các lực tác dụng trong bộ truyền đai.
Câu 3.8
Trình bày cách tính đai theo độ bền lâu.
Câu 3.9
Trình bày cách tính đai theo khả năng kéo.
Câu 3.10
Trình bày trình tự thiết kế bộ truyền đai dẹt.
Câu 3.11
Trình bày trình tự thiết kế bộ truyền đai thang.
CHƯƠNG 4
BỘ TRUYỀN BÁNH MA SÁT
4.1. Khái niệm chung
4.1.1. Giới thiệu bộ truyền bánh ma sát
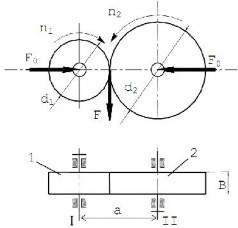
Bộ truyền bánh ma sát thường dùng truyền chuyển động giữa hai trục song song nhau (Hình 4-1), cắt nhau (Hình 4-2), hoặc vừa truyền chuyển động vừa biến đổi vận tốc chuyển động (bộ biến tốc ma sát - Hình 4-3).
Bộ truyền bánh ma sát có 3 bộ phận chính:
+ Bánh ma sát dẫn 1, có đường kính d1, được lắp trên trục dẫn I, quay với số
vòng quay n1, công suất truyền động P1, mô men trên trục T1
+ Bánh ma sát bị dẫn 2, có đường kính d 2, được lắp trên trục bị dẫn II, quay với
số vòng quay n2, công suất truyền động P2, mô men trên trục T2.
+ Bộ phận tạo lực ép ban đầu F0, đề nén hai bánh ma sát với nhau. Lực F0 tạo ra áp lực Fn trên bền mặt tiếp xúc của 2 bánh ma sát, tạo ra lực ma sát Fms; Fms= Fn.f, trong đó f là hệ số ma sát trên bề mặt tiếp xúc.
+ Trong bộ biến tốc ma sát, có thể có thêm bộ phận phụ, như bánh ma sát phụ,
hoặc dây đai phụ (Hình 4-4).
Nguyên lý làm việc của bộ truyền bánh ma sát: hai bánh ma sát được nén bởi lực F0, trên bề mặt tiếp xúc có áp suất, có lực ma sát F ms, lực ma sát cản trở chuyển động trượt tương đối giữa hai bánh ma sát. Do đó khi bánh ma sát dẫn quay sẽ kéo bánh bị dẫn quay theo, như vậy chuyển động đã đượ c truyền từ trục I mang bánh ma sát dẫn sang trục II mang bánh bị dẫn. Cũng giống như bộ truyền đai, bộ truyền bánh ma sát truyền chuyển động nhờ lực ma sát trên bề mặt tiếp xúc của các bánh ma sát. Lực ma sát cần thiết trên bề mặt tiếp xúc phải thoả mãn đ iều kiện:
Fms = Fn.f ≥ K.Ft , K là hệ số tải trọng; lấy K = 1,25÷1,5 (4-1)
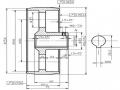
Hình 4-1 Bộ truyền bánh ma sát trụ
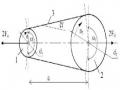
Hình 4-2 Bộ truyền bánh ma sát nón
4.1.2. Phân loại bộ truyền bánh ma sát
Tùy theo hình dạng và đặc điểm làm việc, người ta chia bộ truyền bánh ma sát
ra làm các loại sau:
- Bộ truyền bánh ma sát trụ: các bánh ma sát là hình trụ tròn xoay, đường sinh thẳng, thường dùng để truyền chuyển động giữa hai trục song song với nhau. Bộ truyền bánh ma sát không thay đổi được tỷ số truyền u v à số vòng quay n2.
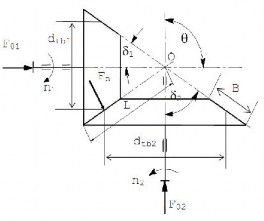
- Bộ truyền bánh ma sát nón, còn được gọi là bánh ma sát côn: bánh ma sát có
dạng hình nón cụt, thường dùng truyền chuyển động giữa hai trục vuông góc với nhau.
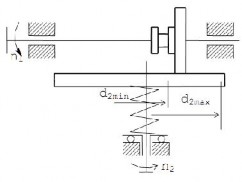
- Bộ biến tốc ma sát trụ: các bánh ma sát hình trụ, bánh 1 di chuyển dọc t rục để thay đổi điểm tiếp xúc với bánh 2, thay đổi đường kính tính tóan của bánh 2 từ d 2min đến d2max (Hình 4-3). Thực hiện thay đổi số vòng quay của trục II từ n 2max đến n2min.
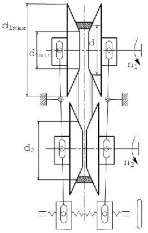
- Bộ biến tốc ma sát nón (Hình 4-4), các cặp bánh ma sát có dạng nón cụt, dây đai là khâu phụ. Các cặp bánh ma sát 1 được điều chỉnh sát nhau, hoặc xa nhau, thay đối điểm tiếp xúc giữa dây đai và bánh ma sát 1, có nghĩa là làm thay đổi đường kính tính toán của bánh 1 từ d1min đến d1max. Tương tự như thế đường kính tính toán của bánh 2 cũng được thay đổi từ d 2max đến d2min. Số vòng quay n1 không đổi, còn số vòng quay n2 sẽ thay đổi từ n2min đến n2max.
Hình 4-3 Bộ biến tốc ma sát trụ Hình 4-4 Bộ biến tốc ma sát nón
4.1.3. Thông số làm việc chủ yếu của bộ truyền bánh ma sát
- Số vòng quay trên trục dẫn, ký hiệu là n 1, trên trục bị dẫn n2; v/ph. Trên bộ biến tốc ma sát còn có số vòng quay lớn nhất n 2max và nhỏ nhất n2min.
- Tỷ số truyền, ký hiệu là u,
u n1 . Trong bộ biến tốc ma sát có tỷ số truyền
n2
cực đại
umax n
n1
2 min
, tỷ số truyền cực tiểu
umin n
n1 .
2 max
- Khoảng điều chỉnh tốc độ trong bộ biến tốc D:
D umax
umin
hay D n2 max .
n2 min
- Công suất trên trục dẫn, ký hiệu là P 1, công suất trên trục bị dẫn P2; kW.
- Hiệu suất truyền động η: P2
P1
- Mô men xoắn trên trục dẫn T 1, trên trục bị dẫn T2; Nmm.
- Vận tốc vòng của bánh dẫn v1, bánh bị dẫn v2; m/s.
- Hệ số trượt ξ: v1 v2 .
v1
- Thời gian phục vụ của bộ truyền, còn gọi là tuổi bền của bộ truyền tb; h.
- Lực ép ban đầu trên mỗi bánh ma sát F 0 (N). Trên bộ nón ma sát có F01 và F02.
- Lực vòng trên bánh ma sát, còn gọi là lực có ích F t:
F 2T1 (N)
t d
1
- Chế độ làm việc,
- Các yêu cầu về môi trường làm việc của bộ truyền.
4.1.4. Thông số hình học chủ yếu của bộ truyền bánh ma sát
Khi cần xác định hình dạng và kích thước của bộ truyền bánh ma sát, ta phải
biết các thông số hình học chủ yếu sau đây:
- Đường kính tính toán của bánh ma sát dẫn d1, của bánh bị dẫn d2; mm; là
đường kính của vòng tròn đi qua điểm tiếp xúc của mỗi bánh ma sát. d 2= d1.u.(1- ξ).
Trên bộ truyền bánh ma sát nón, đường kính tính toán được ký hiệu dtb1 và dtb2.
Đối với bộ biến tốc ma sát có các đường kính giới hạn: d 1min, d1max, d2min, d2max.
- Khoảng cách trục a, là khoảng cách giữa tâm bánh ma sát dẫn và bánh ma sát bị dẫn; mm. Đối với bộ truyền bánh ma sát nón, a được thay thế bằng chiều dài đường sinh mặt nón L.
- Chiều rộng bánh ma sát B1, B2 mm. Thông thường lấy B1 > B2 bằng chiều rộng tính toán của bánh đai B. Để khi có sai lệch do lắp ghép, thì bộ truyền vẫn tiếp xúc đủ chiều dài tính toán B. Cũng có thể lấy B 1 = B2 = B.
- Góc nón của bánh dẫn δ1 và góc nón của bánh bị dẫn δ2, đơn vị đo là độ.
- Góc giữa hai trục của bánh ma sát θ, độ.
4.2. Cơ học truyền động ma sát
4.2.1. Lực tác dụng trong bộ truyền bánh ma sát
- Khi chưa làm việc, các bánh ma sát bị nén bởi lực ép ban đầu F0.
- Khi chịu tải trọng T1 trên trục I và T2 trên trục II, ngoài lực F 0, còn có lực tiếp
tuyến Ft tác dụng lên các bánh ma sát.
F 2T1 , hoặc
t
d1
F 2T1 .
d
t
tb1
- Khi các bánh ma sát quay, sẽ có thêm tải trọng do rung động.
Dưới tác dụng của các tải trọng, trên bề mặt tiếp xúc của các bánh ma sát có lực
pháp tuyến Fn; lực Fn dùng để tính các bánh ma sát.
+ Đối với bánh ma sát trụ: Fn = F0. (4-2)
+ Đối với bánh ma sát nón:
Fn
F01
sin 1
. (4-3)
Từ phương trình (4-1) ta tính được lực ép cần thiết nén hai bánh ma sát
F0 F01
K.Ft1
f
K.Ft1.sin 1
f
(4-4)
(4-5)
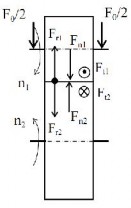
Hình 4-5 Lực trong bộ truyền
bánh ma sát trụ
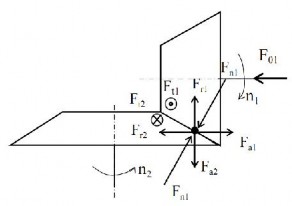
Hình 4-6 Lực trong bộ truyền
bánh ma sát nón
Lực tác dụng lên trục và ổ mang bộ truyền bánh ma sát trụ (Hình 4-5):
+ Lực tiếp tuyến Ft1 và Ft2. Lực tiếp tuyến có phương trùng với tiếp tuyến chung
của hai mặt trụ. Chiều của Ft1 ngược với chiều quay n1, chiều của Ft2 cùng với chiều
quay n2. Giá trị: F F
2T1 2T2
d
d
t1 t 2
1 2
+ Lực hướng tâm Fr1 và Fr2, có phương vuông góc với đường trục của bánh ma
sát, có chiều hướng về phía trục. Giá trị của Fr1 và Fr2 được tính như sau:
Fr1 = Fr2 = F0
Lực tác dụng lên trục và ổ của bộ truyền bánh ma sát nón gồm (Hình 4-6):
+ Lực tiếp tuyến Ft1 và Ft2. Lực tiếp tuyến có phương trùng với tiếp tuyến chung
của hai mặt nón. Chiều của Ft1 ngược với chiều quay n1, chiều của Ft2 cùng với chiều
quay n2. Giá trị:
Ft1
Ft 2
2T1
dtb1
2T2
dtb 2
+ Lực hướng tâm Fr1 và Fr2, có phương vuông góc với đường trục của bánh ma
sát, có chiều hướng về phía trục. Giá trị của Fr1 và Fr2 được tính như sau:
Fr1
F01
tg1
F02;
Fr 2
F02
tg2
F01
+ Lực dọc trục Fa1 và Fa2, có phương song song với trục, chiều hướng về đáy
lớn của mặt nón. Giá trị Fa1 = Fr2, và Fa2 = Fr1.
Các lực Ft1, Fr1, Fa1, Ft2, Fr2, Fa2 dùng để tính trục và ổ mang các bánh ma sát
dẫn và bánh ma sát bị dẫn.
4.2.2. Sự trượt trong bộ truyền bánh ma sát
Tương tự như ở bộ truyền đai, trong bộ truyền bánh ma sát cũng có hiện tượng trượt đàn hồi, trượt trơn hoàn toàn và tr ượt trơn từng phần.
Trượt đàn hồi, xảy ra trên đọan tiếp xúc của hai bánh ma sát, do biến dạng đàn hồi của lớp bề mặt bánh ma sát gây nên. Độ cứng của bề mặt càng nhỏ, biến dạng càng lớn, thì trượt đàn hồi càng nhiều và ngược lại. Lúc này F ms > Ft.
Trượt trơn hoàn toàn, xảy ra khi có quá tải, lúc đó lực ma sát trên bề mặt tiếp
xúc không đủ lớn để cản trở chuyển động trượt tương đối giữa hai bánh ma sát, F ms<Ft,
trong đo Ft là lực vòng trên bánh ma sát.
Trượt trơn từng phần, xảy ra khi lực F ms ≈ Ft, lực Fms biến động phụ thuộc vào hệ số ma sát trên bề mặt tiếp xúc, có lúc F ms > Ft trong bộ truyền có trượt đàn hồi, có những phần thời gian Fms< Ft trong bộ truyền có trượt trơn.
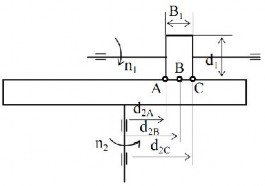
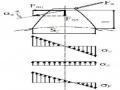
Hình 4-7 Trượt hình học
Ngoài ra, trong bộ biến tốc ma sát còn có hiện tượng trượt hình học, do hình dạng hình học của bánh ma sát gây nên. Ví dụ, trong bộ biến tốc ma sát trụ trên (Hình 4-7), ta thấy tại điểm A và điểm C của mặt tiếp xúc có hiện tượng trượt tương đối, với vận tốc trượt vtrA và vtrC, vì:
+ Vận tốc v1A của điểm A1 thuộc bánh 1, có giá trị
+ Vận tốc v1B của điểm B1 thuộc bánh 1, có giá trị
+ Vận tốc v1C của điểm C1 thuộc bánh 1, có giá trị
+ Vận tốc v2A của điểm A2 thuộc bánh 2, có giá trị
+ Vận tốc v2B của điểm B2 thuộc bánh 2, có giá trị
+ Vận tốc v2C của điểm C2 thuộc bánh 2, có giá trị
v1A v1B v1C v2 A v2 B
v2C
.d1.n1 6.104
.d1.n1 6.104
.d1.n1 6.104
.d2 A .n2
6.104
.d2 B .n2
6.104
.d2C .n2
6.104
+ Như vậy là v1A= v1B= v1C. Trong khi đó v2A < v2B < v2C.
+ Thông thường v1B = v2B, còn v1A> v2A và v1C < v2C.
+ Tại điểm A, có vtrA = v1A - v2A. Còn tại điểm C, có vtrC = v2C - v1C.
Ta nhận thấy rằng, khi chiều rộng B1 càng lớn thì độ chênh lệch giữa d 2A với d2B càng nhiều, và giá trị của vận tốc trượt càng lớn.
Trượt đàn hồi và trượt t rơn làm mất mát công suất và mất vận tốc của bánh bị dẫn. Trượt hình học chỉ làm tổn hao công suất, không làm mất vận tốc. Tương tự như trong bộ truyền đai, để kể đến công suất bị mất, người ta dùng hệ số hiệu suất η. Kể đến vận tốc bị mất người ta dùng hệ số trượt ξ.
4.3. Tính bộ truyền bánh ma sát
4.3.1. Các dạng hỏng và chỉ tiêu tính toán
Trong quá trình làm việc bộ truyền bánh ma sát có thể bị hỏng bởi các dạng
hỏng sau:
- Trượt trơn, bánh ma sát dẫn quay, bánh bị dẫn dừng lại, bộ truyền không làm việc được nữa. Trượt trơn làm bánh ma sát bị dẫn mòn cục bộ.
- Mòn bánh ma sát, do áp suất lớn, vận tốc trượt lớn và hệ số ma sát lớn, nên tốc độ mòn của bánh ma sát tương đối cao. Mòn làm mất đi một lớp vật liệu trên bề mặt bánh ma sát, dẫn đến hình dạn g của bánh ma sát thay đổi, chất lượng bề mặt giảm. Mòn quá mức độ cho phép, bộ truyền làm việc không tốt nữa.
- Tróc rỗ bề mặt, đối với những bộ truyền được bôi trơn đầy đủ, làm việc với áp suất nhỏ hoặc trung bình, sau một thời gian dài làm việc, trên b ề mặt bánh ma sát xuất hiện các vết rỗ. Vết rỗ làm giảm chất lượng bề mặt, bộ truyền làm việc không tốt nữa. Nguyên nhân có vết rỗ là do ứng suất tiếp xúc trên mặt bánh ma sát thay đổi, bề mặt bị mỏi, xuất hiện các vết nứt. Vết nứt lớn dần lên do số chu trình ứng suất N tăng lên, đồng thời do tác dụng của chêm dầu. Dầu chui vào vết nứt, khi vào vùng tiếp xúc vết nứt bị bịt miệng, áp suất dầu trong vết nứt tăng lên, giống như cái chêm, làm cho vết