DANH MỤC BẢNG BIỂU
Bảng 2. 1 Thông số kỹ thuật camera CIC- 1300-60-G 14
Bảng 2. 2 Thông số kỹ thuật card frame Grabber 15
Bảng 2. 3 Thông số kỹ thuật Card truyền thông cc24 Cognex 16
Bảng 2. 4 Biên độ góc quay các trục robot ABB1200 18
Bảng 2. 5 Tiêu chuẩn robot ABB đáp ứng 19
Bảng 2. 6 Thông số kỹ thuật bộ điều khiển robot IRC5 Compact 21
Bảng 2. 7 Thông số kỹ thuật module cclink DSQC 378B 23
Bảng 2. 8 Thông số kỹ thuật module nguồn Q61P 24
Bảng 2. 9 Module Q06UDVCPU 25
Bảng 2. 10 Thông số kỹ thuật module cclink QJ61BT11 26
Bảng 2. 11 Thông số kỹ thuật Module điều khiển động cơ QD77MS4 27
Bảng 2. 12 Thông số kỹ thuật Servo motor HG-KR43B 28
Bảng 2. 13 Thông số kỹ thuật Driver motor MR-J4-GE 28
Bảng 2. 14 Thông số kỹ thuật động cơ 40W S9I40GXH-12CE 29
Bảng 2. 15 Thông số kỹ thuật biến tần Mitsubishi FR- A7NC E700 30
Bảng 2. 16 thông số kỹ thuật cảm biến LEUZE ELECTRONIC - FT5iX3/2N . 30 Bang 3. 1 sơ đồ đấu dây 54
CÁC TỪ TIẾNG ANH, VIẾT TẮT SỬ DỤNG TRONG LUẬN VĂN
Tiếng Việt/ Giải thích | |
CClink | Phương thức truyền thông |
Calibration | Hiệu chỉnh |
Camera | Máy ảnh |
Zoom | Phóng to / thu nhỏ |
Foundry Plus Robots | Một loại robot |
FlexPedant | Tay cầm điều khiển robot |
Driver moto | Bộ khuếch đại servor |
Xylinder | Xy lanh |
Sensor | Cảm biến |
IRC5 Compact | IRC5 nhỏ gọn |
Motor | Mô tơ |
Robot controller | Bộ điều khiển robot |
Point | Điểm |
Module | Mô đun |
Card | Bo mạch |
Align | Căn chỉnh |
Vacuum | Chân không |
On | Bật |
Off | Tắt |
CClink | Controller communication link |
Calibration | Hiệu chỉnh |
Trigger | Hoạt động |
Picker | Công cụ gắp sản phẩm |
Load | Nhận sản phẩm |
Unload | Xuất sản phẩm |
Home | Vị trí an toàn |
Alarm | Cảnh báo |
Configuration | Cấu hình |
Exposure Time | Thời gian phơi sáng |
Có thể bạn quan tâm!
-
 Nghiên cứu công nghệ vision kết hợp với robot công nghiệp nhằm cải tiến độ chính xác trong quy trình sản xuất màn hình điện thoại - 1
Nghiên cứu công nghệ vision kết hợp với robot công nghiệp nhằm cải tiến độ chính xác trong quy trình sản xuất màn hình điện thoại - 1 -
 Mối Quan Hệ Giữa Tiêu Cự Và Góc Nhìn Của Ống Kính Máy Ảnh.
Mối Quan Hệ Giữa Tiêu Cự Và Góc Nhìn Của Ống Kính Máy Ảnh. -
 Thông Số Kỹ Thuật Bộ Điều Khiển Robot Irc5 Compact
Thông Số Kỹ Thuật Bộ Điều Khiển Robot Irc5 Compact -
 Thông Số Kỹ Thuật Module Điều Khiển Động Cơ Qd77Ms4
Thông Số Kỹ Thuật Module Điều Khiển Động Cơ Qd77Ms4
Xem toàn bộ 89 trang tài liệu này.
Độ sáng | |
Master station | Trạm chủ |
Communication | Truyền thông |
setting | Cài đặt |
Slave station | Trạm con |
Point | Điểm |
MỞ ĐẦU
Lý do chọn đề tài
Sản xuất công nghiệp thế giới đang bước vào cuộc cách mạng công nghiệp lần thứ 4 trong đó có Việt Nam. Ở những nước có nền công nghiệp phát triển như Đức, Mỹ, Nhật Bản… cuộc cách mạng công nghiệp lần thứ 3 công nghệ tự động hóa đã phát triển mạnh mẽ. Việt Nam điều kiện kinh tế chậm phát triển tự động hóa được áp dụng tại các nhà máy sản xuất chưa được áp dụng hoặc được áp dụng với hàm lượng chưa cao. Được sự chỉ đạo mạnh mẽ từ chính phủ, đảng nhà nước các doanh nghiệp trong nước cũng như những doanh nghiệp có vốn đầu tư nước ngoài đang chuyển đổi mạnh mẽ nhằm đón đầu xu thế cuộc cách mạng công nghiêp lần thứ 4. Đề tài “Nghiên cứu công nghệ vision kết hợp với robot công nghiệp nhằm cải tiến độ chính xác trong quy trình sản xuất màn hình điện thoại”. Nhằm tiếp cận công nghệ sản xuất hiện đại của thế giới, Nâng cao tỷ lệ tự động hóa trong nhà máy, cung cấp phương tiện thu thập data về hình ảnh sản phẩm nhằm nâng cao chất lượng sản xuất.
Mục đích của đề tài:
Cung cấp giải pháp về việc kết hợp các công nghệ vision và robot vào sản xuất công nghiệp nhằm cải thiện độ chính xác. Từ đó nghiên cứu mở rộng phạm vi áp dụng cho nhà máy sản xuất màn hình điện thoai cũng như các ngành sản xuất khác
Đối tượng nghiên cứu
Hệ thống vision cognex kết hợp với robot công nghiệp ABB
Phương pháp nhiên cứu
Tiến hành nghiên cứu và thử nghiệm trên đối tượng thực tế kết hợp với lý thuyết
Nội dung luận văn Luận văn gồm ba chương: Chương 1: Mở đầu
Giới thiệu công nghệ vision và tổng quát về một thiết bị cụ thể có sự kết hợp giữa công nghệ vision và robot công nghiệp.
Chương 2: Cấu trúc phần cứng hệ thống.
Giới thiệu các thành phần cấu trúc phần cứng Chương 3: Lập trình cho hệ thống, truyền thông và kết quả
Cấu hình và lập trình cho các thành phần hệ thống Kết quả của dự án và hướng phát triển
CHƯƠNG I: TỔNG QUAN
1.1 Giới thiệu công nghệ vision
1.1.1 Khái niệm
Công nghệ Vision là việc kết hợp giữa công nghệ và phương pháp phân tích hình ảnh một cách tự động để trích xuất thông tin cần thiết thông tin đó có thể là màu sắc, các thông số kích thước, đặc điểm tốt, không tốt hoặc các dữ liệu phức tạp như danh tính, vị trí, hướng của từng đối tượng trong hình ảnh. Khác với công nghệ xử lý hình ảnh đầu ra là một hình ảnh khác. Những thông tin này có thể được sử dụng cho các ứng dụng như:
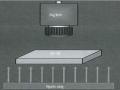
Thứ nhất đinh vị :
Hình 1. 1 Vision cognex nhận diện vị trí hàng hóa trên băng chuyền
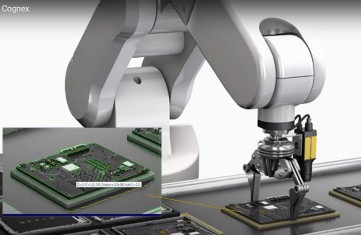
Thứ hai phát hiện, đánh giá, đọc các loại ký tự và các loại mã.
Hình 1. 2 Vision Cognex đọc mã.
Thứ ba kiểm tra và đo lường
Hình 1. 3 Vision Cognex kiểm tra lỗi của sản phẩm
Các lĩnh vực ứng dụng của công nghệ Vision bao gồm: Sản xuất linh kiện điện tử, công nghệ sản xuất màn hình điện thoại, màn hình tivi, các loại màn khác, công nghệ sản xuất chất bán dẫn, công nghệ lắp ráp tự động, công nghệ vũ trụ quan sự, công nghệ sản xuất hàng tiêu dùng, công nghệ sản xuất thực phẩm và một số ngành sản xuất khác.
1.1.2 Cách thành phần cơ bản của thiết bị Vision
Các thành phần cơ bản của một thiết bị Vision bao gồm : Nguồn sáng, ống kính, máy ảnh, bộ xử lý hình ảnh.
Nguồn sáng
Nguồn sáng là cung cấp ánh sáng cho máy ảnh hoạt động. Dựa vào yêu cầu thực tế của việc sử dụng Công nghệ Vision mà người ta thiết lập các kiểu
đèn chiếu sáng cũng như cách chiếu sáng khác nhau. Một số phương thức chiếu sáng điển hình:
Thứ nhất chiếu sáng trực tiếp
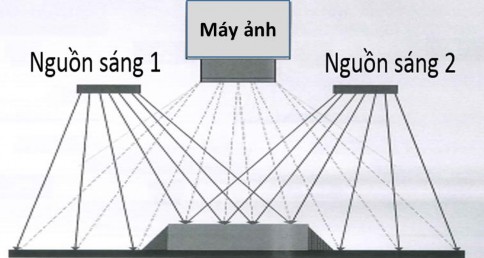
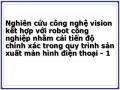
Hình 1. 4 Phương thức chiếu sáng trực tiếp
Đặc điểm : Ánh sáng được chiếu thẳng từ vật thể. Ưu điểm: Độ tương phản lớn, giá thành rẻ
Nhược điểm: Phản xạ toàn phần với bề mặt nhẵn bóng nên thường bị lóa. Một số kiểu đèn cơ bản: Đèn vòng tròn, đèn thanh, đèn dạng điểm.
Thứ hai chiếu sáng gián tiếp:
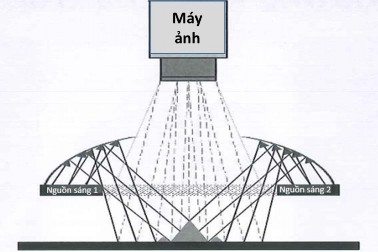
Hình 1. 5Phương thức chiếu sáng gián tiếp