ứng được mọi yêu cầu của hành khách và tối ưu về quãng đường buồng thang di chuyển, tối ưu về thời gian và năng lượng. Thang máy thường được điều khiển theo chiều tối ưu về chiều chuyển động.
5.1.7 Nguyên tắc hoạt động
PLC sẽ nhận tín hiệu của lệnh gọi tầng hoặc đến tầng đầu tiên để xác
định chiều chuyển động cho thang máy ( nhờ vào sự so sánh vị trí của buồng thang đang đứng với lệnh đến tầng ). Nếu lệnh gọi tầng mà lớn hơn vị trí mà buồng thang thì PLC sẽ phát lệnh cho thang máy đi lên, trong quá trình đi lên PLC vẫn tiếp tục nhận các lệnh gọi tầng và đến tầng. Các lệnh này sẽ được nhớ vào, trong quá trình chuyển động (chuyển động lên ). Nếu ta ấn thang máy đến tầng 4 thang máy chuyển động lên trong quá trình chuyển động lên nếu có người nào đó ấn tầng 3 thì thang máy sẽ dừng ở tầng 3 trước sau đó mới tiếp tục chuyển
động lên tầng 4 đây là quá trình thực hiện lệnh quá giang. Sau khi thang máy thực hiện xong tất cả các lệnh gọi tầng và đến tầng tiếp theo chiều chuyển động của nó sẽ tự động quay lại để thực hiện các lệnh vừa nhớ. Động cơ chỉ được dừng khi cảm biến ở mỗi tầng tác động. Việc đóng mở cửa chỉ được thực hiện khi thang máy đã dừng hẳn, cửa sẽ tự động mở ra, sau một thời gian nhất định sẽ
đóng lại nếu trong quá trình đóng cửa có trướng ngại vật cửa sẽ tự động mở ra.
5.1.8 Giải thích lưu đồ điều khiển
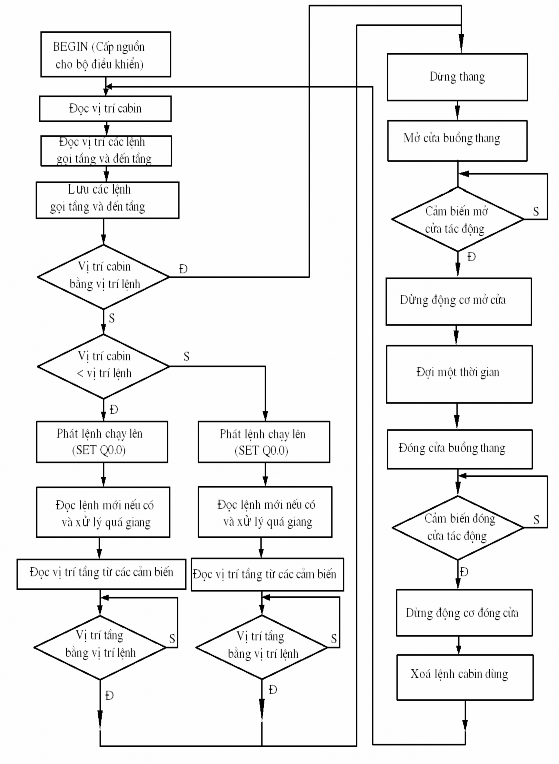
Ban đầu ta cấp nguồn cho bộ điều khiển, bộ PLC sẽ kiểm tra vị trí cabin sau
đó kiểm tra lệnh gọi, đến tầng và lưu lệnh gọi, đến tầng rồi kiểm tra tầng. Sau khi
đọc vị trí buồng thang song PLC tiếp tục nhận các lệnh gọi tầng, đến tầng và sẽ
đem so sánh với vị trí buồng thang.
Nếu vị trí buồng thang bằng vị trí lệnh thì PLC sẽ phát lệnh dừng buồng thang xoá các lệnh ở tầng tại vị trí buồng thang dừng, cửa buồng thang sẽ tự động mở ra cho đến khi cảm biến mở cửa tác động thì động cơ mở cửa ngừng tác động,
đợi một thời gian nhất định PLC phát lệnh đóng cửa buồng thang cho đến khi gặp cảm biến đóng cửa thì động cơ dừng lại. Sau đó lại đọc vị trí buồng thang, nhận các lệnh đến tầng và đem so sánh sau đó lại tiếp tục quá trình.
Nếu vị trí buồng thang <vị trí lệnh PLC phát lệnh cho động cơ chạy thuận, trong quá trình chạy thuận PLC sẽ đọc các lệnh quá giang theo chiều chạy thuận.
Đọc vị trí tầng từ các cảm biến nếu vị trí tầng bằng vị trí lệnh PLC sẽ dừng động cơ quay trở lại quá trình đóng mở cửa.
Nếu vị trí buồng thang > vị trí lệnh PLC sẽ phát lệnh chạy xuống, trong quá trình chạy xuống PLC sẽ đọc các lệnh quá giang theo chiều xuống. Vị trí tầng
được đọc từ các cảm biến nếu vị trí tầng bằng vị trí lệnh PLC sẽ phát lệnh dừng
động cơ quá trình đóng mở cửa diễn ra.
5.1.9 Mạch cảm biến và rơ le sử dụng trong mô hình
* Nguồn và mạch cảm biến Nguyên lý làm việc:
- Nguồn: Ta sử dụng một biến thế giảm thế 220V/24V xoay chiều cấp cho bộ chỉnh lưu cầu , ta sử dụng một tụ lọc để làm giảm sự nhấp nhô của sóng điện
áp ở đầu ra sau đó đưa qua bộ ổn nguồn để lấy đầu ra 5V cấp nguồn cho mạch cảm biến.
Vào PL
C
Vào PL
C
Vào PL
C
Vào PL
C
![]()
Hình V.4. Nguồn và mạch cảm biến sử dụng trong mô hình
- Mạch cảm biến: Ta sử dụng cặp thu phát hồng ngoại, các điện trở, biến trở, mạch so sánh thuật toán, đèn LED và nguồn đấu như hình V.4.
Nguyên lý làm việc của mạch như sau: Ban đầu khi không gian giữa con thu và con phát chưa bị che thì chân 5 của con thu ở mức thấp(0V) do đó đầu vào chân 2 của mạch so sánh thuật toán có mức thấp(0V). Ta điều chỉnh triết áp R3 sao cho điện áp vào chân 3 của mạch so sánh thuật toán lớn hơn 0V và nhỏ hơn 5V khi đó mạch sẽ so sánh thấy tín hiệu ở chân 2 nhỏ hơn tín hiệu ở chân 3 vì thế
đầu ra của mạch so sánh có giá trị 1(dương) làm cho Tranzitor Q1 thông sẽ đặt giá trị đất(0V) lên đầu vào của PLC. Khi không gian giữa cặp thu phát bị chắn thì giá trị cao(gần 5V) sẽ đặt ở chân 5 của cặp thu phát dẫn đến chân 2 của mạch so sánh sẽ có giá trị cao(gần 5V). Do đó chân 3 của mạch so sánh thuật toán có tín hiệu nhỏ hơn chân 2 nên đầu ra của mạch này sẽ có giá trị 0(âm) làm cho tranzitor Q1 ngắt vá sẽ đặt giá trị gần 24V vào đầu vào của PLC do đó đầu vào của PLC sẽ có tín hiệu.
* Mạch rơ le
Nguyên lý làm việc: Khi đầu ra PLC 1 ở mức cao(24V)(tín hiệu điều khiển
động cơ chạy thuận) cuộn dây của rơ le 1 có điện sẽ đóng 2 cặp tiếp điểm 4 sang 8 và 13 sang 9 của rơ le 1 khi đó điện cấp cho động cơ kéo cabin sẽ có chiều dương từ nguồn +24V qua tiếp điểm 9 sang tiếp điểm 13 và đi về cực dương của
động cơ(cực 1). Còn cực âm(cực 2) của động cơ đi qua tiếp điểm 8 sang tiếp
điểm 4 rồi về đất lúc này động cơ quay thuận. Khi đầu ra PLC 2 có tín hiệu(mức cao 24V) thì cuộn dây của rơ le 2 có điện sẽ đóng 2 cặp tiếp điểm 4 sang 8 và 13 sang 9 của rơ le 2 khi đó nguồn dương đi vào động cơ sẽ qua tiếp điểm 8 sang tiếp điểm 4 rồi vào động cơ(cực 2), còn cực âm(cực 1) đi từ động cơ qua tiếp
điểm 13 và 9 rồi trở về đất. Như vậy là chiều quay của động cơ đã được đảo và
động cơ quay ngược.
Nguyên lý như vậy tương tự đối với động cơ đóng mở cửa cabin thông qua rơ le 3 và 4.
Rơ le 1
Rơ le 2
Rơ le 3
Rơ le 4
Hình V.5. Sơ đồ đấu đầu ra của PLC để điều khiển rơ le đóng ngắt động cơ kéo cabin và đóng mở cửa cabin
5.2 Phân công các đầu vào/ra
ë sơ đồ trên mỗi tầng bố trí 2 nút gọi tầng ( một nút gọi lên và một nút gọi xuống ) riêng ở tầng 1 chỉ có nút gọi xuống và tầng 4 chỉ có nút gọi lên, trong cabin có 4 nút ấn tương ứng với 4 tầng của thang máy.
ë mỗi tầng có 1 cảm biến, ta có 4 tín hiệu từ cảm biến vào PLC . Cảm biến
đóng mở cửa có 2 . Như vậy ta có tất cả 16 đầu vào PLC.
Đầu ra từ bộ PLC :
+ Đầu ra điều khiển thang máy đi lên.
+ Đầu ra điều khiển thang máy đi xuống.
+ Đầu ra điều khiển động cơ đóng cửa cabin.
+ Đầu ra điều khiển động cơ mở cửa cabin.
5.3 Xây dựng chương trình điều khiển
5.3.1 Bảng phân công các đầu vào
Tên đầu vào | Địa chỉ | Ký hiệu | |
1 | Cảm biến tầng 1 | I0.0 | F1 |
2 | Cảm biến tầng 2 | I0.1 | F2 |
3 | Cảm biến tầng 3 | I0.2 | F3 |
4 | Cảm biến tầng 4 | I0.3 | F4 |
5 | Nút bấm gọi xuống tầng 1 | I1.0 | FR1 |
6 | Nút bấm gọi lên tầng 2 | I1.2 | FR2 |
7 | Nút bấm gọi xuống tầng 2 | I1.1 | |
8 | Nút bấm gọi lên tầng 3 | I1.3 | FR3 |
9 | Nút bấm gọi xuống tầng 3 | I1.4 | |
10 | Nút bấm gọi lên tầng 4 | I1.5 | FR4 |
11 | Cảm biến đóng cửa buồng thang | I1.6 | CLS |
12 | Cảm biến mở của buồng thang | I1.7 | OP |
13 | Nút đến tầng 1 | I0.4 | TCB |
14 | Nút đến tầng 2 | I0.5 | TCB |
15 | Nút đến tầng 3 | I0.6 | TCB |
16 | Nút đến tầng 4 | I0.7 | TCB |
Có thể bạn quan tâm!





