Luận Án Tiến Sĩ Kỹ Thuật Nghiên Cứu Xác Định Định Hướng Không Gian Của Thiết Bị Bay Theo Các Phép Đo Từ Trường Trái Đất - 1 Trang 1 Trang 2 Trang 3 Trang 4 Trang 5 Trang 6 Trang 7 Trang 8
KẾT LUẬN VÀ KIẾN NGHỊ Trên cơ sở xác định rõ mục đích, đối tượng và phạm vi nghiên cứu tác giả đã đặt ra các bài toán cần giải, tiến hành nghiên cứu lý thuyết, tính toán, mô phỏng, triển khai thực nghiệm minh chứng và đạt ...
y , z , E - góc quay cánh lái tương ứng gật, hướng và liệng, [rad]; k 0 , k 1 - hệ số truyền mạch hồi tiếp theo góc và tốc độ góc quay cánh lái; V 2 2 2 q - áp lực tốc độ, [N/ m ; kg/m.s ]; 2 S M , S CL – tương ứng diện tích ...
Bổ sung phương trình (4.9) vào hệ (4.1) và thay phép đo ở (4.7) vào (4.3) ta sẽ thu được mô hình động học và mô hình quan sát mới. Phần tính toán mặc dù có phức tạp hơn nhưng sẽ có độ chính xác ước lượng cao hơn. UKF Master UKF Slaver ...
Hướng, góc liệng của TBB trong không gian phục vụ cho quá trình ĐKĐH cho TBB. 4.3 Thiết kế và xây dựng phần mềm thực nghiệm Với mục đích tổng hợp bộ lọc số, việc đầu tiên cần phải thực hiện đó là rời rạc hóa mô hình trạng ...
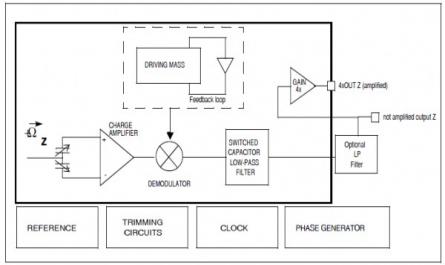
4.2 Thiết kế và tổ chức phần cứng thực nghiệm 4.2.1 Lựa chọn các loại cảm biến 1. Lựa chọn cảm biến đo từ trường ba trục [26] Theo giới thiệu tại điểm 3 mục 2.2.2 (một số loại cảm biến từ trường công nghệ mới). Lựa chọn ...
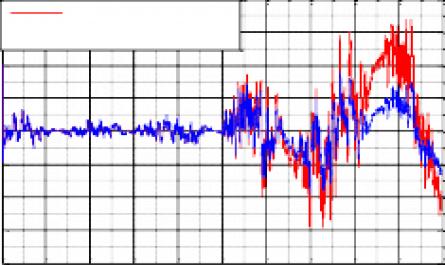
Khi cho nhiễu tác động nhỏ, sai số đánh giá các VTT và VTG sử dụng thuật toán EKF mô phỏng theo phương pháp thực nghiệm Monte Carlo được thể hiện trên hình 3.7.(a, b, c, d, e, f) 2 Sai so danh gia H1x 1.5 1 0.5 0 -0.5 -1 -1.5 -3 x 10 2 Sai so danh gia w1x ...
zˆ 1,k H ˆ 1x,k ( ) zˆ 2,k H ˆ 1y,k ( ) z ˆ zˆ 3,k H ˆ 1z,k 4,k ˆ 1y,k ( ) ( ) - Phương trình tính hệ số khuếch đại lọc: k k k k k k k 1 K P ( )H T H P ( )H T R 1 0 0 0 ...
Y H (t) H*(t) F (t) *(t) a) Đầu vào y H 1x và đầu ra (đánh b. Đầu vào F 1x và đầu ra 1X H 1X giá) * bộ lọc theo trục X 1 . bộ lọc theo trục X 1 . y H (t) H*(t) F (t) *(t) c. Đầu vào y H 1 y và đầu ra (đánh d. Đầu vào F 1y và ...
Với các góc Ơ-le ( , , ) đã biết [1]. Trên cơ sở mô hình toán này có thể xây dựng và giải bài toán lọc phi tuyến các góc định hướng và các VTG theo các phép đo VTT và một cảm biến bổ sung thông tin VTG. Trong khuôn khổ của ...
Trang 13, Trang 14, Trang 15, Trang 16, Trang 17, Trang 18, Trang 19, Trang 20, Trang 21, Trang 22,