The angular momentum of a solid about the axis of rotation is
Lz I z , where I z
is the quantity
Maybe you are interested!
-

 Impact of Improper Solid Waste Disposal
Impact of Improper Solid Waste Disposal -
 Study of rainbow effect and alpha transfer mechanism in low and medium energy scattering - 2
Study of rainbow effect and alpha transfer mechanism in low and medium energy scattering - 2 -
 Query Processing and Optimization in Distributed Object-Oriented Databases - 17
Query Processing and Optimization in Distributed Object-Oriented Databases - 17 -
 Study on the nutritional effectiveness of homemade high-energy solution for early feeding through nasogastric tube for critically ill patients at Hue Central Hospital - 1
Study on the nutritional effectiveness of homemade high-energy solution for early feeding through nasogastric tube for critically ill patients at Hue Central Hospital - 1 -
 Results of Running the Suffix Expression Evaluation Program
Results of Running the Suffix Expression Evaluation Program
does not change over time, so when applying formula (3.61) we get:
d ( I dt
z ) I z
d I dt z
m z ( F k )
(3.65)
Equation (3.65) is called the differential equation of motion of a rotating object around a fixed axis, it can also be written in the form:
I z m z( F k)
(3.66)
Example 3.5 . A rope carrying a heavy object of weight Q is wound on a winch drum of weight P and radius r. Ignore the mass of the rope and friction at the winch bearings. Determine the angular acceleration of the winch drum when the heavy object falls vertically. Given that the radius of inertia of the winch drum with respect to its axis of rotation is . (Figure 3.15)
Solution R
Survey of the movement system including winch and heavy object.
External forces acting on the mechanical system include the following forces:
winch, weight and reaction force R at the bearing.
Applying (2.45) we have:
P , Q
of tangent O
P
d L z
m ( P ) m ( Q ) m z ( R )
dt zz
The expression of the moment of inertia of the mechanical system is calculated according to the formula
awake:
teacher
Q 2 P 2 Qr 2 Q
Since:
Lz L z
L z
I z gr g
Figure 3.15
d g dt
QR
P 2 Qr 2
The - sign shows that the drum rotates faster and faster clockwise.
3.3.3. Kinetic energy theorem
3.3.3.1. Kinetic energy
The kinetic energy of a point mass m moving with velocity v is a scalar quantity, denoted by T:
T 1 mv 2
2
(3.67)
The kinetic energy of a mechanical system is the total kinetic energy of the material points in the mechanical system.
v
T 1 m 2
2k
(3.68)
The unit of kinetic energy is kgm 2 / s 2 .
3.3.3.2. Work and power
1. Elemental work of force
The elemental work of force F , its point of application moves along curve C, after a period of time dt performing the elemental movement ds is determined by the following formula:
d ' A F t ds
(3.69)
In which F t
is the projection of the force onto the tangent of the trajectory at point
setting of force F (Figure 3.16).
M
M 1
v
M 2
C
r
F
O
y
Figure 3.16
z
x
Elemental work of force
d' A
can be positive, negative or zero depending on the angle
between force F and angular velocity v of the point where force F is applied is acute, obtuse or right angle.
The elemental work of force is also written in the following forms:
d ' A F cos . ds F . dr F . v . dt F t v t dt F x dx F y dy F z dz
In there:
is the angle between force F and angular velocity v ;
r is the position vector of the force application point;
(3.70)
F t , v t is the projection onto the tangent direction of the trajectory at the point of application of force F ;
F x , F y , F z are the projections of force F onto the Cartesian coordinate axes Oxyz .
In the case where a point is subjected to the action of many forces, F is the resultant of those forces.
2. Finite work of force
When the point of force F moves from position M 1 to position M 2, the work done by force F corresponding to that movement is determined as follows:
s 2 r 2 t 2
MM
A 1 2 F cos . ds Fdr F . v . dt F x dx F y dy F z dz
s 1 r 1 t 1
M 1 M 2
When a point is subjected to the action of many forces, force F is the resultant of those forces.
and clearly we have the following property:
The work (elementary work) of the resultant force is equal to the sum of the work (elementary sum) of the component forces.
The unit of work is Nm also known as Joule (J).
3. Capacity
Power is the work done by force in a unit of time. Power is symbolized by W.
W d ' A
dt
F. dr
.
F v
dt
(3.71)
The expression of power can be written in the following forms:
W Fcos .v F t . v t F x x F y y F z z
The unit of power is Watt (w) 1w= 1 J/s
3.3.3.3. Kinetic energy theorem
Theorem. The derivative with respect to time of the kinetic energy of a point is equal to the power of the force acting on the point:
dT
dt
F . v
(3.72)
Proof: Write the basic equation of dynamics for the point, then multiply both sides by the velocity of the point, we have:
m . a . v F . v
Note that:
m .
a . v
we have right away:
d ( 1
dt2
mv 2 )
d ( 1
dt2
mv 2 ) dT
dt
dT
dt
F . v
That is what needs to be proven.
v .
r
Equation (3.72) can also be written as follows:
dT
So we have:
F . dt
F . d d ' A
(3.73)
Theorem: The differential kinetic energy of a point is equal to the elemental work of the force acting on the point.
Theorem: The derivative of the kinetic energy of a mechanical system over time is equal to the total power of the internal and external forces acting on the mechanical system:
dT F e . v F i . v
(3.76)
dt kkkk
Proof. For a material point M k in the mechanical system, with mass m k , subjected to the action
F
k
use of external force e
and internal force
k
F i , according to (3.72), we have:
d 1 2 eiei
(
dt2
m k v k ) ( F k
F k ). v k F k . v k F k . v k
When taking the sum of both sides of the equation just obtained, we have:
d 1 2 d 1
2 dT ei
dt ( 2
m k v k )
dt2
( m kv k)
dt F k . v k F k . v k
That is what needs to be proven.
Similarly, in the case of a point, we have:
Theorem: The differential kinetic energy of a mechanical system is equal to the sum of the elemental work of the external and internal forces acting on the mechanical system.
k
k
dT F e . dr
F i . d
(3.75)
k
k
Proof: From formula (3.74) we get:
k
k
k
k
k
k
k
k
dT F e . v dt F i . v dt F e . dr F i . d
That is what needs to be proven.
The above theorems give the rate of change of kinetic energy with time. Below we present theorems on the change of kinetic energy in a finite time interval (the accumulation of kinetic energy).
Theorem: The change in kinetic energy of a point in a certain movement is equal to the work done by the force acting on the point in that movement.
1 1
2 2 2
r 2
1
mv 2
mv2 F . dr
r 1
(3.76)
Proof. Integrating both sides of the equality (3.73) with the corresponding limits, we immediately get the formula (3.76)
Theorem: The change in kinetic energy of a mechanical system in a certain period of time is equal to the sum of the external and internal forces generated in the displacement corresponding to that period of time.
T T F e . dr F i . d
(3.77)
2 1 kk kk
Proof. The theorem will be proven when we integrate both sides of the equality (3.75) with respect to the corresponding limits:
dT
F e . dr F i . d
Since:
T T
kk
F e . dr
kk
F i . d
2 1 kk kk
That is what needs to be proven.
It should be noted that internal forces change the kinetic energy of the mechanical system. Therefore, the kinetic theorem
The ability reflects the nature of the process of changing the motion of the mechanical system and thanks to it the motion state of the mechanical system is studied deeply.
3.3.3.4. Application
1. Expression of kinetic energy of a moving solid
a) Solid object in translational motion: An object with mass M moves with velocity v . In this case, all the particles of the object have the same velocity v, therefore:
T 1 mv 2 1 mv 2 1 m v 2 1 Mv 2
(3.78)
2k 2k 2k2
b) A solid rotating around a fixed axis: Consider an element Mk of a solid, with mass mk , located at a distance rk from the axis of rotation . The velocity of Mk will be vk = rk , where is the angular velocity of the object rotating around the fixed axis. Therefore:
T 1 mv 2 1 m ( r ) 2 1 mr 2 2 1 I 2
(3.79)
2 kk 2 kk 2 kk 2 z
Where J z is the moment of inertia of the object about the axis of rotation.
c) Solid object moving in parallel planes: Case of flat plate with mass velocity
center C is
v C , has angular velocity with respect to the center of mass C is s and has mass M.
T 1 Mv 2 1 I 2
2 C 2C
Where I C is the moment of inertia of the plate about the axis through the center of mass C and perpendicular to the plate plane.
2. Expression of work of some forces
a) Work of gravity. Suppose point M is subject to the effect of gravity P , moving along a certain curve C (Figure 3.17). To calculate the work of gravity, we use the formula:
MM
A 1 2 F x dx F y dy F z dz
M 1 M 2
When choosing the Oz axis pointing vertically up: P x = P y = 0; P z = - P
So:
z
M 2 (x 2 ,y 2 ,z 2 )
(C) P'
M 1 (x 1 ,y 1 ,z 1 )
O P
y
x110
Figure 3.17
1 2 2 1
z 2
A M M Pdz P ( z z ) P . h
z 1
Where h is the travel height.
(3.80)
The work done by a force will be positive when the point of application of the force is lowered and negative when the point of application of the force is raised and zero when the point of application of the force moves in the horizontal plane.
The work of gravity does not depend on the shape of the trajectory of the point of application of the force but only on the initial and final positions of the point of application. When the point of application moves a closed path, the work of the force is zero.
Work of the gravity system. When the system moves from position I to position II, the objects
k
Its point moves accordingly from the transition position from C I to C II .
( I )
M
k
arrive
M ( II ) , and the center of mass of the system moves
The work of the forces in that movement will be equal to:
k
k
k
k
k
k
k
C II
C I
A P ( z ( II ) z ( I ) ) P z ( II ) P z ( I ) P ( z z
C
) Ph
(3.81)
In which: P = P k ;
and I of the muscular system;
z and
C
II
z : is the height of the center of mass of the mechanical system corresponding to positions II
C
I
h C : is the height of the center of mass movement.
c
r
b) Work of linear elastic force
Elastic force obeys Hooke's law:
F
In which: r is the position vector of the material point relative to the center, and c is a constant proportional coefficient, called the stiffness coefficient (Figure 3.18)
M 1
M
r 1
r
r 2
M 2
O
y
z
x
Figure 3.18
The work done by force F when its point of application moves from M 1 to M 2 is calculated by the formula:
r 2
r 2
1 r 2
1 r 2
2
A Fdr c rdr c d ( r ) 2
c d ( r ) 2
r 1 r 1 r 1
2 r 1
So:
A c ( r 2 r 2 )
(3.82)
2 2 1
In the case of a spring, the work of the spring's elastic force when its end is deformed by a distance compared to its undeformed state (natural state) is equal to:
A c 2
2
As in the case of gravity, the work done by a linear elastic force does not depend on the trajectory of the point of application of the force, but only on its initial and final positions.
c) Work of force acting on a solid object in translational motion
According to the formula for calculating elemental work, we have:
d ' A
F . dr F . v . dt F . v C . dt F. dr . C
d) Work of force acting on an object rotating around a fixed axis:
Using the formula:
d ' A F t . v t . dt F t . R . . dt m z ( F ) d
(3.83)
Work of a torque acting on an object rotating around a fixed axis, the torque has moment m and lies in a plane perpendicular to the axis of rotation:
d ' A md
e) Work of force applied to parallel moving plate
(3.84)
Consider a flat plate rotating around an axis perpendicular to the plane of the plate and passing through the instantaneous center of rotation. Directly applying the formula for calculating the work of the force acting on the rotating object, we have:
d ' A m P ( F ) d s
(3.85)
In there:
m P ( F )
is the moment of force F about the instantaneous center of rotation.
Formula (3.85) can be written in the form:
d ' A m C
( F ) d s
F d
C r C
(3.86)
In case the flat plate is subjected to a torque located in the plate plane and has a moment m :
d ' A md s
g) Work of internal force system in solid
(3.87)
F
Consider any two elements of a solid M k and M' k . The mutual force between the two
k
That element is denoted by M k M' k .
F k and
' with
F k F ' k
These two forces are in the same direction.
According to the formula for calculating elemental work, we have:
dA
,
,
, '
k F k dr k F ' k dr k
F k dr k F k dr k
F k d ( r k r k ) F k d ( M k M k )

k
k
Because force F is in the same direction and opposite to M ' M

should:
k
k
F k k
M'M
In which: k is some positive scalar quantity. So:

dA '

k F k d ( M k M k )
k
( M ' M

k
k
) d ( M ' M )

k
k
k d ( M ' M ) 2

F F'
M'k
2k
I k k k

k d ( M ' M ) 2

2k
0
r k r'
Because according to the definition of a solid, the distance between k
two points M'k and M k are always constant.O
From that: dA = dA k = 0
that is: the sum of the internal forces of a solid is always zero.
Figure 3.19
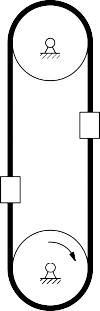
Example 3.6 . A transmission system consists of two shafts which are solid circular homogeneous shafts of weight Q and radius R rotating around separate axes of rotation.
fixed O 1 and O 2 and the conveyor belt is a closed, inextensible wire segment ,
has mass m. (Figure 3.20). O 2
The buckets have weights P 1 and P 2 . The rotating shaft O 1 is subjected to a torque M = const. Find the velocity of the bucket according to

distance traveled, given that the system was initially at rest. B
Solution P 2
Mechanical survey includes: Two rotating shafts, conveyor belt, two buckets A

contact A and B. P 1
Force acting on the mechanical system: the work force includes weights
forces: P 1 ; P 2 and torque M (the gravitational forces of the two rotating axes and O 1
Conveyors do not do work because their point of application is stationary) .
First we calculate the kinetic energy expression of the objects.
belong to the system: Figure 3.20
T axis =
1I 2 ; T
2 A
1 P 1

2 g
v 2 ; T
1 P 2 2

v
2 g B
A
B
When calculating the kinetic energy of the conveyor belt, we note that due to the inextensible nature of the conveyor belt, all elements of the conveyor belt have the same velocity and equal to v: