The thesis only focuses on reducing torsional vibrations of the machine shaft, not considering other vibrations, such as axial vibrations, bending vibrations, etc. The calculation when taking into account these vibrations is mentioned by the author in the next research direction of the thesis.
4. Research methods.
Based on the actual machine shafts, the author converts to a theoretical model with a DVA vibration absorber installed. From the calculation model of the machine shaft with a DVA, the author uses the Lagrange equation of the second kind to establish the differential vibration equation of the system.
From the obtained system of differential oscillation equations, the author conducts research, analysis and calculation to reduce torsional oscillation for the machine shaft, finding analytical solutions of the system using the following methods : Two fixed points method, second order moment minimization method, equivalent resistance maximization method and energy minimization method.
Maybe you are interested!
-

 Overview of Research on Factors Affecting the Linkage of Small and Medium Enterprises with Enterprises with Direct Investment Capital
Overview of Research on Factors Affecting the Linkage of Small and Medium Enterprises with Enterprises with Direct Investment Capital -
 Overview of Research Works in the Overview of Research Situation and Issues to be Solved in the Thesis
Overview of Research Works in the Overview of Research Situation and Issues to be Solved in the Thesis -
 Overview of Vietnam Commercial Banks and Research Design
Overview of Vietnam Commercial Banks and Research Design -
 Research Model From Overview of Related Research Situation
Research Model From Overview of Related Research Situation -
 Overview of a Typical Research-Oriented University in Vietnam - Vietnam National University, Hanoi
Overview of a Typical Research-Oriented University in Vietnam - Vietnam National University, Hanoi
To perform calculations and evaluate the effectiveness of vibration reduction of the research results of the thesis, the author built computer programs on Maple software to simulate the vibration of the system so that readers have an intuitive view of the effectiveness of the vibration absorber. This is the software that is used by scientists around the world and gives reliable results.
5. New contributions of the thesis.
- Calculations to find the optimal parameters of the DVA vibration absorber to reduce torsional vibration for a single-degree-of-freedom machine shaft using different methods. The optimal parameters are presented in explicit analytical form.
- Build calculation programs on software to evaluate, compare and verify the differences through the output response of the simulation model in the case of the system being subjected to harmonic agitation, collision agitation and random agitation with the optimal parameter set.
- Developed research results for the case of the main system with many degrees of freedom. Provided analytical expressions of parameters in the optimization case for systems with 1, 2 and 3 degrees of freedom.
6. Thesis layout.
The thesis consists of an introduction, four chapters and a conclusion, directions for further research with 139 pages, 12 tables and 45 figures and graphs.
Chapter 1 presents an overview of research on torsional vibration reduction and calculation methods to determine optimal parameters of vibration absorbers.
Chapter 2 establishes a computational model and determines the system of micro-motion equations describing the oscillation of the mechanical system.
Chapter 3 solves the problem of calculating torsional vibration reduction for machine shafts and determining the optimal parameters of the DVA dynamic absorber by different methods.
Chapter 4 analyzes and evaluates the effectiveness of vibration reduction based on the optimal results determined in Chapter 3, numerically simulating the research results of torsional vibration reduction for machine shafts. Developing research results for the case of machine shafts with multiple degrees of freedom.
The main results, new contributions and future research directions of the thesis are summarized in the conclusion.
List of published works of the thesis includes 06 articles, including:
Article 1 is published in the Journal of Multibody Dynamics (ISI indexed, Impact Factor 1.242).
Article No. 2 was published in the Journal of Science and Technology, Technical Universities, ISSN 2354-1083.
Article No. 3 was published in the Journal of Structures and Construction Technology, Vietnam Association of Structures and Construction Technology, ISSN 1859-3194.
Paper No. 4 was published at the Collection of Scientific Works of the 2nd Conference on Mechanics and Automation held at Hanoi University of Science and Technology on October 7-8, 2016, ISBN 978-604-95-0221-7.
Article No. 5 published in Journal of Science and Technology, Hung Yen University of Technical Education, ISSN 2354-0575.
Paper No. 6 is published in Proceedings of the 2014 RCMME International Conference, ISBN 978-604-911-942-2.
CHAPTER 1. OVERVIEW OF RESEARCH ON TORSIONAL VIBRATION REDUCTION AND METHODS OF DETERMINING OPTIMAL PARAMETERS
1.1. Overview of torsional vibration reduction studies.
Torsional vibrations of rotating systems are mainly caused by the uneven transmission of torque (torque changes over time) between rotating parts of the machine. Excessive torsional vibrations in mechanical systems lead to noise or fatigue damage. Therefore, they need to be prevented or controlled immediately to ensure the reliability of the system. Passive vibration control has been widely applied due to its simplicity in a wide torque range and acceptable efficiency. Among the passive control techniques, centrifugal pendulum vibration absorber (CPVA) is one of the most widely used methods, which can be found in various heavy machinery, such as helicopters and internal combustion engines. These studies deal with the design optimization of the slide profile of CPVA to minimize torsional vibrations in a shaft system.
Figure 1.1. Model of CPVAs torsional vibration absorber.
The torsional vibration absorber CPVA consists of masses mounted on a rotor in such a way that they are free to move along specified paths relative to the rotating systems. The motion of the masses is used to counteract the torques thus reducing the torsional vibrations of the rotating machine parts [54], [65]. One of the
The first design of CPVA was introduced and published by Kutzbach, where the CPVA structure consisted of moving masses in U-shaped channels filled with liquid (Figure 1.1).
In 1929, Carter developed a form of CPVA for diesel engines [25]. Subsequently, CPVAs with different designs were introduced to be used for a wider range of system operating conditions. Taylor [57] proposed CPVAs for use in aircraft engines with variable speed conditions. In this study, the weight of the centrifugal mass was designed so that the restoring force varied with speed.
Sarazin [53] introduced CPVA, which consisted of a compact pendulum design with rollers applied to aircraft engines. Until the early 1980s, most designs of CPVAs used circular profiles [21], [34]. Subsequently, various non-circular path shapes were considered for CPVA design, such as cycloidal [40], epicycloidal [26], [38], and tautochronic curves [28], [41].
Mayet and Ulbrich [41] presented isochronous design for single absorbers to obtain the mean equations of motion for steady state. They also obtained linear and nonlinear and optimized equations for isochronous CPVAs using the mean Hamiltonian formulation [42].
Besides theoretical studies, experimental studies on CPVA have also been carried out.
Shaw et al. [34], [48], [54] tested the effect of oscillation moment characteristics on the stability of a shaft-CPVA system through experiments. These computational studies showed that the moving masses in circular slides with the center coincident with the center of the shaft are the best, especially the number of CPVAs used is an even number, the effect of reducing torsional oscillation will be the best (Figure 1.1).
Mayet et al. [43], [44] conducted experiments to test the steady state and transient response of the angular velocity of a rotating system with CPVA.
Nowadays, CPVA research is gaining increasing interest due to the continuous increase in demand for higher fuel efficiency, lower emissions, and better performance.
14
smoothness of the rotating system.
Swank and Lindemann [55] proposed a combination of both tuned mass damper (TMD) and centrifugal pendulum damper (CPVA) for use in modern powertrains.
Recently, Sedaghati et al. [56] developed a torsional vibration damper by combining conventional CPVA and magnetic damper.
In general, a large number of studies on shaft torsional vibration and CPVA have been conducted in terms of shaft rotational speed or angular acceleration variation [34], [48], [54]. The steady-state responses of torsional vibration are often considered in most studies [34], [40], [41], [42], [43], [44], [48], [54].
However, torsional vibration determined by the relative twist angle between the two ends of the shaft is rarely discussed. In fact, the determination of torsional vibration of the shaft is very important because it allows the determination of stress in the shaft, as well as the assessment of the fatigue strength of the shaft [35].
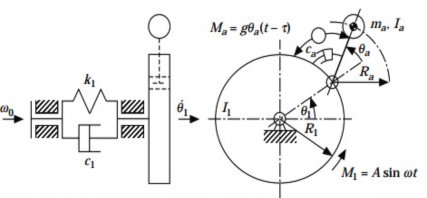
Figure 1.2. CDR oscillation absorber model.
Hosek [35] proposed a centrifugal delayed resonator (CDR), which is a controllable device to reduce torsional vibrations in rotating mechanical structures. In this study, Hosek modeled a uniform rotating shaft with angular velocity ω 0 consisting of three components: a torsion spring with torsional stiffness k 1 , an environmental damper with damping coefficient c 1 and a disc with moment of inertia I 1 . The excitation torque due to the actuator system attached to the shaft is modeled as a periodic M 1 =Asin ωt. M a (t) is the control torque to stabilize
15
torsional oscillation of the shaft; R 1 , R a and θ a are respectively the shaft radius, pendulum length and relative rotation angle of the pendulum with respect to the shaft.
Differential equation of oscillation of mechanical system:
aaa
I
m R 2RR
( t ) I
m R 2 ( t ) c ( t )
1
a
1
aaaaa
m RR 2 ( t ) M
( t ) 0
1
a
1 1 1 1 1
a 1 a 0 aa
1
I
n I
nm
R 2RR
( t ) c
( t ) k ( t )
aaaaa
n I
nm
R 2RR
( t ) nc ( t ) n M
( t ) M
( t ) 0
aaaaa
1
aaaaaaaaa
1
In there:
θ 1 is the rotation angle of the shaft;
1 1 0 t is the twist angle between the two shaft ends. m a , c a times
are the mass and viscous damping coefficient of the vibration absorber, respectively. I 1 , I a are the mass moment of inertia of the shaft and CDR, respectively. M a (t) is the control torque to stabilize the torsional vibration of the shaft.
This research also focuses on stability and control of vibrations, the research has not focused on the optimal design of the vibration absorber . The research results that Hosek gave are:
- In steady state, CDR is capable of completely eliminating unwanted oscillations of the main structure under the excitation of harmonic torque;
- Due to its real-time tuning, the CDR works perfectly with torsional oscillation problems with different oscillation times. It can respond to an extremely wide frequency range, especially in cases where the disturbance frequency tends to increase with the angular velocity of the main system;
- The control algorithm for CDR is very simple to implement especially using advanced digital signal processing devices; Due to the passive nature of CDR, it can still partially operate even in case of control failure assuming that the passive centrifugal pendulum is used properly.
From the above studies, we can see that the authors only focus on studying the stability and motion control of torsional vibration absorbers, but there are very few studies that determine the optimal parameters of the vibration absorbers to reduce the vibration.
16
torsional vibrations for the machine shaft such as viscous damping ratio, the ratio between the natural frequency of the DVA and the shaft from which allows the selection of viscous dampers and spring stiffness for the optimal DVA design.
In [21], [25], [26], [34], [41], the reduction of torsional oscillations using oscillation absorbers was studied. However, these studies only considered the motion of the oscillation absorber and focused on finding the optimal sliding profile of the absorber masses m and the number of absorbers used with the goal of stabilizing the torsional oscillations of the system. In the differential equations of oscillations of the mechanical system, these studies have not considered the torsional oscillations of the shaft.
In studies [35], [44], the authors modeled the machine shaft including a torsion spring with stiffness k s and a disc with stiffness J r subjected to environmental resistance with damping coefficient c s . To reduce torsional vibrations for the shaft, studies proposed installing CDR (centrifugal delayed resonator) and DVA vibration absorbers . However, these studies only focused on vibration control to stabilize torsional vibrations. The studies have not focused on finding the optimal parameters of the vibration absorber to reduce torsional vibrations for the machine shaft.
Recently, in [7], [9], [10], [14], [30] studies have been conducted to determine the optimal parameters for DVA absorbers mounted on torsional machine shafts as shown in Figures 1.3, 1.4 and 1.5. In these studies, the authors used numerical methods to determine the optimal parameters.
m 2
g
c
l 2
A
B
e
D
k m
l 1
m 1
Figure 1.3. Model of the oscillation absorber.
In [7], [9], the authors calculate the optimal parameters to reduce torsional oscillations for the main shaft of the T616 universal lathe by installing a DVA absorber as shown in Figure 1.3. The DVA absorber in [7], [9] has the form of an eccentric pendulum connected to the rotor of the main shaft through a viscous damper c and a torsion spring k m . The study uses the method
Taguchi experimental planning method combined with numerical simulation on Maple. The study simulated the torsional vibration of the shaft with the optimized DVA set for better response compared to when the DVA was not installed.
y
c
2
m
k m
m
2
e
3
k t
x
In the study [10], the Taguchi experimental planning method was also used for the model of a torsional machine shaft with a DVA in the form of a centrifugal pendulum (Figure 1.4). This study showed that although there was a good response in terms of torsional vibration reduction efficiency for the shaft, due to the fact that the DVA itself is in the form of a centrifugal pendulum and is mounted on a rotating machine shaft, it causes instability for the shaft, especially the dynamic reaction force at the joints is very large. The study concluded that when studying and calculating the optimal parameters for the DVA, it is not only necessary to pay attention to the torsional vibration reduction efficiency but also to consider the stability of the mechanical system, especially the dynamic reaction force at the joints to increase the life of the joints and avoid joint destruction.
Figure 1.4. Model of a centrifugal pendulum oscillation absorber.
In the study [14], the Levenberg-Marquadt nonlinear regression method was used to construct a nonlinear regression function describing the relationship between the parameters of the circular slide-type DVA absorber (Figure 1.5), including mass ratio, stiffness ratio and viscous damping ratio.
The study established a nonlinear regression function describing the relationship between DVA parameters and shaft torsional vibration; evaluated the reliability of the regression function through variance assessment. From there, the optimal parameters of DVA were determined to reduce shaft torsional vibration.